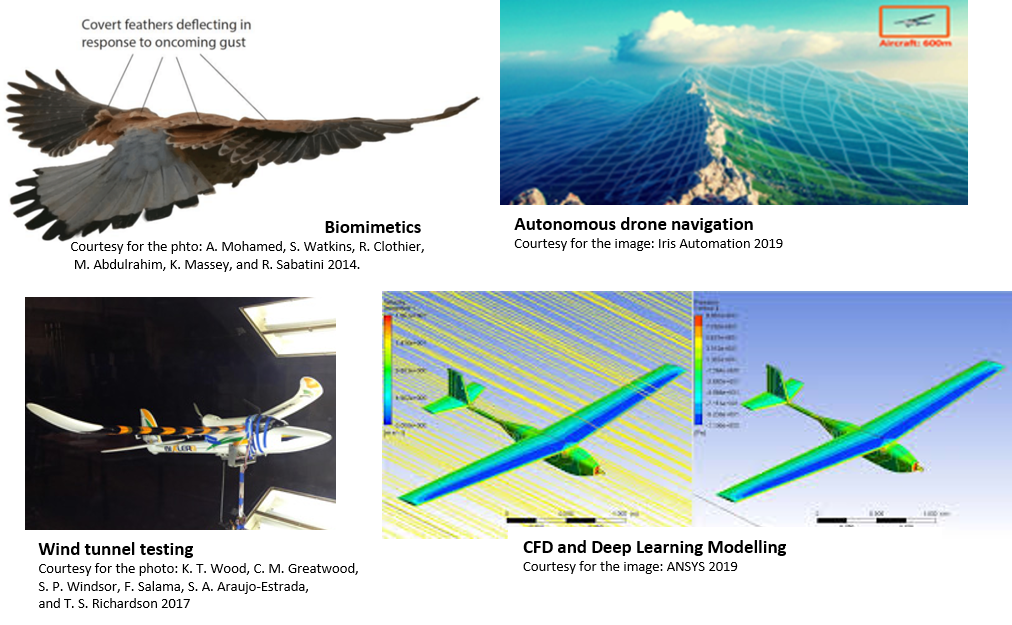
For any vehicle moving in autonomous mode, reliable navigation is crucial. To operate drones in cluttered and challenging environments such as cities, forests or mountainous terrain, their position, attitude, and velocity must be known accurately. The lack or disturbance of GNSS (Global Navigation Satellite System) signals due to obstructions or external interference can cause complete failure of a drone navigation system, which would be unacceptable for any application Beyond Line-Of-Sight (BLOS). Currently, at TOPO, a novel navigation system is developed based on flight dynamics [1]. With a Vehicle Dynamic Model (VDM), drones can navigate through a complex environment in the absence of GNSS signal. However, wind and gust effects cause drift errors, which may accumulate up to hundreds of metres during a GNSS outage of a few minutes (see [2], [3]).
An ongoing research project at TOPO (sponsored by several Swiss ETH domain government agencies and EPFL) aims at drawing inspiration from nature to solve this problem. The development of a novel Flush Air Data sensor (FADS) network and analysis framework – based on Computational Fluid Dynamics (CFD) and Deep Neural Networks – will provide real-time drone “skin sensation” of the wind effects, and the underlying aerodynamic forces will be integrated into the VDM-based navigation.
The Student (Master or Semester project) would have the exiting chance to join ongoing research collaboration (3 EPLF laboratories and 2 Swiss government institutions) and can take part both in the technical (instrumentation/wind tunnel testing) and or computational part (Deep-Learning, Computational Fluid Dynamics). The workload can be split upon specific project arrangement. In more detail, available challenges can be seen outlined below:
Experimental (together with our collaborators from https://www.epfl.ch/labs/unfold/)
- To contribute to the study of measurement uncertainty, sensitivity and practical performance of state-of-the-art air pressure, strain gauges and beyond state-of-the-art velocity vector measurement sensors (heat-flux based). This experimental work would validate the performance of the novel sensors envisaged to be integrated within the concept of ‘drone-skin’ distributed sensation system.
- To participate in the instrumentation of the wind tunnel and the gathering of experimental data.
- To validate predictions of new models (CFD and Deep Learning based) for aerodynamic forces prediction by comparison with wind tunnel data.
Modelling and Computer Science (together with our CFD collaborators from https://www.epfl.ch/labs/mcss/ and https://datascience.ch/)
- To contribute to state of the art CFD high performance cluster modelling or drone aerodynamics and model calibration. To carry out statistical sensitivity studies for the CFD simulations, in order to assess their accuracy.
- To perform sensitivity studies for appropriate sensor selection and mounting location
- To develop Deep Neural network technologies that can translate time series of measurements from aerofoil sensors to a) set of aerodynamic coefficients, b) reconstruction of complete aerodynamic field (both in real-time). To study their uncertainty
- To develop synthetic navigation training data sets and study various navigation architectures that can leverage upon the given Deep Learning estimation technologies
Prerequisites:
General understanding and interest in the field of (drone, robotics, aerodynamics, CFD modelling (OpenFoam), deep-learning technologies, instrumentation) are good pre-requisite for a student joining the project.
Contact:
References:
[1] M. Khaghani and J. Skaloud, “Autonomous Vehicle Dynamic Model-Based Navigation for Small UAVs,” Navigation, vol. 63, no. 3, pp. 345–358, Sep. 2016.
[2] M. Khaghani and J. Skaloud, “Assessment of VDM-based autonomous navigation of a UAV under operational conditions,” Rob. Auton. Syst., vol. 106, no. 106, pp. 152–164, Aug. 2018.
[3] M. Khaghani and J. Skaloud, “Evaluation of Wind Effects on UAV Autonomous Navigation Based on Vehicle Dynamic Model,” Proc. 29th Int. Tech. Meet. Satell. Div. Inst. Navig. (ION GNSS+ 2016), pp. 1432–1440.