Keywords
UAV, Kalman Filter, ROS, ROS2, Software development
Introduction
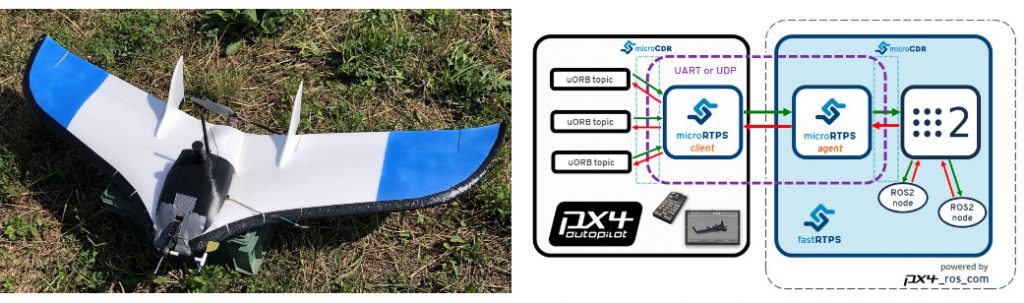
VDM-based navigation is a novel approach to autonomous navigation that improves the estimation of the navigation states (position, velocity, attitude) under normal and GNSS denied flight condition without the addition of extra-sensors. A custom delta-wing UAV has been constructed at TOPO with the objective of implementing real-time VDM-based navigation on an onboard computer.
Objectives
The project’s goal is the development of the C++ based code based on Kalman Filtering with the platform aerodynamic model employed as process model. This will require the transfer of information logged in the autopilot (Pixhawk running PX4 firmware) to the companion computer using a RTPS/DDS bridge (PX4-ROS2 interface). This interface allows reliable sharing of time-critical/realtime information between the flight controller and offboard components.
Tasks
- Enable and test the RTPS bridge (PX4-ROS2 interface)
- Get familiar with the already developed C/C++ based code for a conventional aircraft UAV
- Adaption of the C/C++ based code from a conventional aircraft UAV to the custom Deltawing UAV
- Validation of the software in ROS environment by replaying ROSbags (logs) from real flight data
The project will involve collection of real flight data with the Delta-wing UAV under exam and the student will be able to learn the different aspects of participating to a real flight campaign.
Prerequisites
Robotics/Computer Science/Microtechnique with:
- experience with programming in Linux environment
- good knowledge of C/C++
- basic knowledge of Kalman filtering
- knowledge of ROS
Advantages:
- knowledge of ROS2 is not mandatory but welcome
- knowledge of Mathematica is not mandatory but welcome
Contact
Interest candidates are kindly asked to send Pasquale Longobardi ([email protected]) by email their CV and short motivation statement.