Preamble: The exact definition of the work will depend on the nature of the project (e.g. semester, PDM, etc.)
This project is a collaboration between TOPO laboratory and Fastree3D, an EPFL/TU-Delft spin-off, based both in Lausanne and Delft. It leverages more than 20 years of academic research in CMOS image sensors and Single-Photon detectors. They focus on intelligent 3D vision systems for the automotive market. Their product is a flash LiDAR (or else called Time-Of-Flight camera, or range camera) that measures distances for each pixel based on time-of-flight technology.
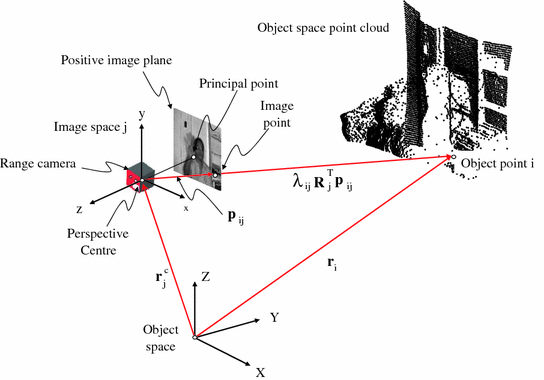
(Pfeifer et al., 2013)
The distance to objects is determined by measuring the time taken for a light pulse to travel from the imager to the object and back again. The on-board illumination module generates light pulses that illuminate the entire scene at once, like in conventional photography. The Fastree3D LiDAR detects the reflected pulses and determines their time of arrival, hence allowing the digital signal processor to measure the time-of-flight and consequently the distance.
Their measurement technique, based on time-correlated single-photon counting, enables the evaluation of a per pixel quality measurement, in real time. The final output is a 3D point-cloud, where distance measurements performed by each pixel are tagged with a confidence value.
Task
In this project, the candidate student will perform the calibration of the Fastree3D flash LiDAR, similarly as in (Pfeifer et al., 2013) with a range camera. The task is:
- to calibrate the lens distortions, as well as the coefficients (a,b) that translate the time ti into distance di for the pixel i in the sensor plane via the simplified formula: di = ati + b ,
- to establish a calibration workflow.
More details will be given in due time. The data acquisition will be performed at the Fastree3D laboratories at the EPFL Innovation Park.
Recommended type of work
Semester project, Master thesis
Reference
Pfeifer, N., Lichti, D., Böhm, J., Karel, W., 2013. 3D Cameras: Errors, Calibration and Orientation, in: Remondino, F., Stoppa, D. (Eds.), TOF Range-Imaging Cameras. Springer, Berlin, Heidelberg, pp. 117–138. https://doi.org/10.1007/978-3-642-27523-4_6