
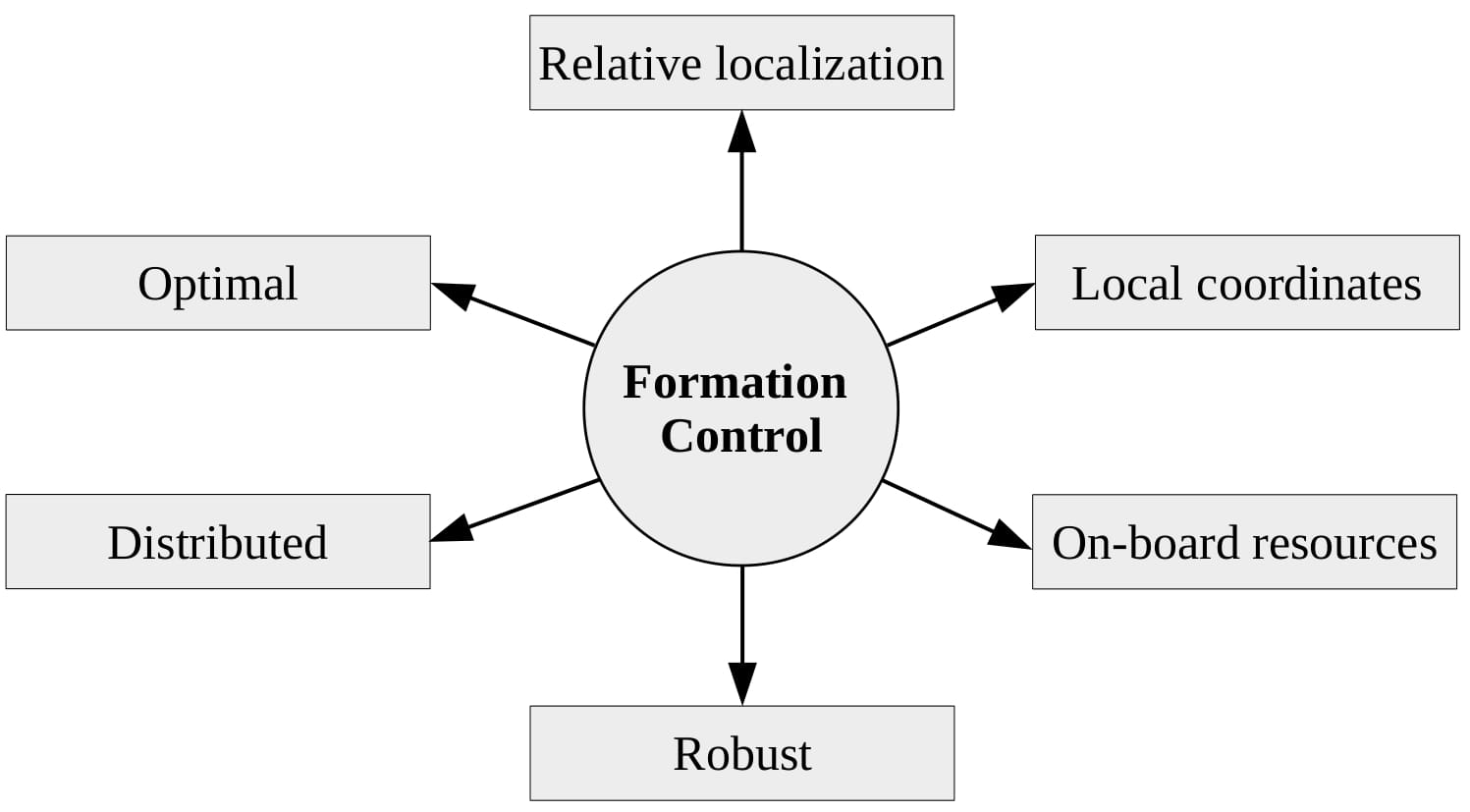
This project targets to achieve the coordination and cooperation of multiple rotary-wing Micro Aerial Vehicles (MAVs) by exploiting the deliberate formation control strategies for robots. Notably, in this project, Model Predictive Control (MPC) is adopted as an optimal control strategy due to various benefits such as the ability to handle constraints, design specifications, and performance systematically, the architectural flexibility and reconfigurability, and additional robust properties. Specific emphasis is given to Nonlinear Model Predictive Control (NMPC) since the governing models for agile multi-rotor MAVs are represented by nonlinear equations. Other than optimality, autonomy also has an important place in this project. As a result, the project focuses on relative localization, utilizing onboard resources (computation, perception, and communication) and local geometric formulations.
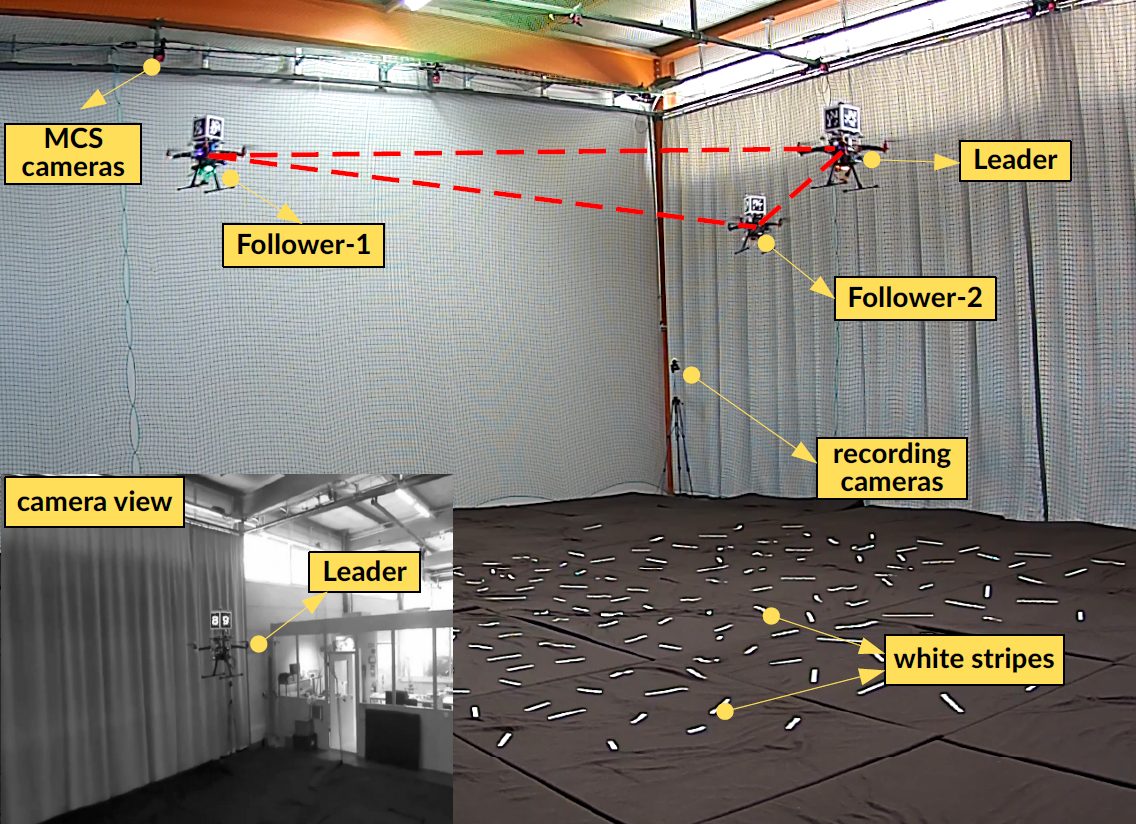
As in this project, experimental validation of the designed algorithms is crucial for robotic systems. To validate our approach, we run experiments in an indoor facility equipped with a motion capture system (MCS), providing millimetric position accuracy. As a rotary-wing MAVs system, a team of small-scale quadrotors equipped with many onboard sensors such as a 3D relative range-bearing-orientation sensor, IMU, optical flow, stereo camera and a computation unit capable of running real-time optimal control is employed.
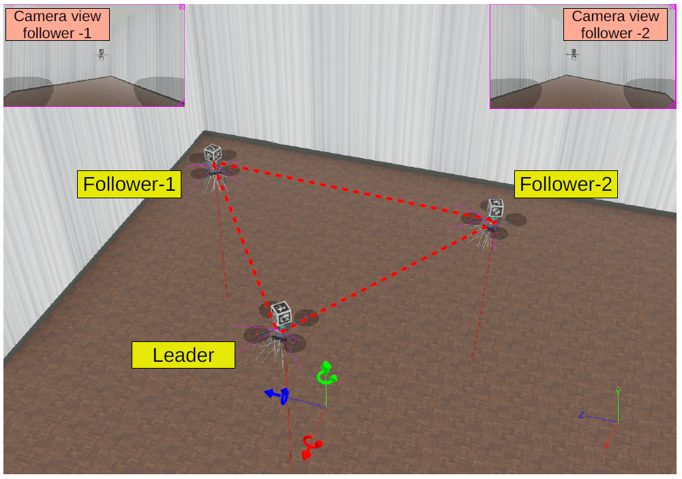
Two screenshots from Webots simulation (left) and physical experiments (right) consisting of three robots can be seen below:
 |
 |
Team and Collaborators
In collaboration with Rodrigo Ventura, Institute for Systems and Robotics, Instituto Superior Tecnico, Lisbon, Portugal
Research Period and Sponsors
This project started in September 2017 and is still ongoing. This project has been partially supported by the FCT grant [PD/BD/135151/2017], the FCT doctoral program RBCog and the FCT project [UID/EAA/5009/2013].
Related Student Projects and Internship
- DISAL-MP45: Hugo Grall Lucas, Performance and Comparison Analysis of Linear Model Predictive Control on Reference Tracking Quadrotors
- DISAL-MP46: Harsh Jaiswal, A Robust Model Predictive Control Approach for Trajectory Tracking MAVs under Wind Disturbance
- DISAL-SP151: Jianhao Zheng, Distributed Model Predictive Control Architectures for Multi-Rotor Micro Aerial Vehicles
- DISAL-SP150: Leo Alvarez, Establishing a High Fidelity Communication Network among Multi-rotor MAVs
- DISAL-SU33: Jianhao Zheng, Comparison of Linear and Nonlinear Model Predictive Control Strategies for Trajectory Tracking MAVs
- DISAL-SP159: Frank Centamori, Solver Comparison for Complex and Real-time Nonlinear Model Predictive Control Problems
- DISAL-SP158: Tifanny Pereira Portela, Flocking of Multi-Rotor Micro Aerial Vehicles via Model Predictive Control with Collision Avoidance
- DISAL-SP170: Yacine Derder, Automated Calibration Algorithm for a 3D Infrared Relative Localization Sensors for Quadrotors
- DISAL-SP169: Theo Gieruc, Vision-based Localization Solution for a Team of Quadrotors in Formation
- DISAL-MP49: Shashank Mahendra Deshmukh, Design and Analysis of Modular and Scalable Model Predictive Control for MAVs Performing Formations
- DISAL-MP56: Augustin_Desombre, Cooperative optimal target tracking for fixed-winged aerial robot networks with connectivity constraints