A joint effort between the Autonomous Systems Laboratory (ASL), the Swarm-Intelligent Systems Group (SWIS), and the Laboratory of Intelligent Systms (LIS), the e-puck was designed to be a robust and powerful miniature robotic platform inexpensive enough to allow extensive classroom use. Hands-on experience with the real robots is afforded to students in several courses at EPFL, including Swarm Intelligence.
All of the information related to the design and production of the e-puck and its associated tools has been made available under an open hardware license from the e-puck website.

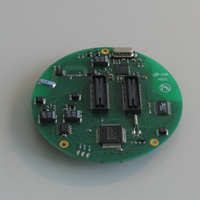
The radio communication module
An additional turret has been developed to allow radio communication between e-pucks and with other 802.15.4/ZigBee devices. It is fully inter-operable with the MICAz sensor nodes as well as any other devices using TinyOS in the 2.4GHz band. A custom attenuation circuit was also included to reduce the effective range of the radio transmitter to a software controllable value between approximately 10cm and 5m, allowing us to build interesting network topologies even within the relatively close confines of a laboratory arena.
Team and Collaborators
Sponsors
EPFL -FIFO