A smart car that assists driving must give warnings in dangerous situations, override the driver to avoid collisions, and help reach the intended destination as quickly as possible. Unfortunately, satisfying these requirements without limiting the decisional autonomy of the individual driver becomes an extremely hard problem to solve with traditional engineering methods. Biologically-inspired techniques such as Evolutionary Computation and Swarm Intelligence provide promising new ways to tackle the design and control problems of a traffic system.
Team and Collaborators
NSF via CNSE under Grant EEC-9402726
Publications
2008
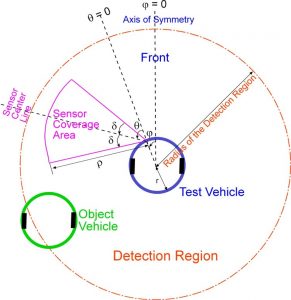
Evolutionary engineering design synthesis of on-board traffic monitoring sensors
Y. Zhang; E. K. Antonsson; A. Martinoli
Research In Engineering Design. 2008. Vol. 19, num. 2-3, p. 113-125. DOI : 10.1007/s00163-008-0047-0. 2006
Evolving Neural Controllers for Collective Robotic Inspection
Y. Zhang; E. K. Antonsson; A. Martinoli
2006. 9th Online World Conference on Soft Computing in Industrial Applications (WSC9). p. 721-733. DOI : 10.1007/3-540-31662-0_55. 2003
Evolving Engineering Design Trade-Offs
E. K. Antonsson; Y. Zhang; A. Martinoli
2003. 15th International Conference on Design Theory and Methodology, Chicago, Illinois, USA, September 2–6, 2003. p. 819-827. DOI : 10.1115/DETC2003/DTM-48676. 2002