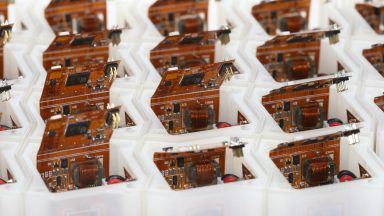
DISAL’s research focuses on the development of design, modeling, control, and optimization methodologies for distributed cyber-physical systems such as multi-robot systems, sensors and actuator networks, and multiple intelligent vehicles. It involves expertise in mechatronic hardware design, algorithmic development, control and estimation methods, machine-learning and metaheuristic optimization techniques, simulation tools, and systematic experimentation in indoor and outdoor settings.
Find out more about research at DISAL: