We study the problem of collaborative target localization using a team of miniature robots. This type of behavior can be useful for robotic groups in a variety of situations, including locating mines for demining, finding victims in a disaster area, and planetary exploration. Our focus has been devoted to two main research thrusts: synthesis of effective swarm-robotic search controllers and modeling and experimental validation of the distributed robotic search. Work specifically focusing on multi-robot odor source localization is being explored as well.
Synthesis of Effective Swarm-Robotic Controllers
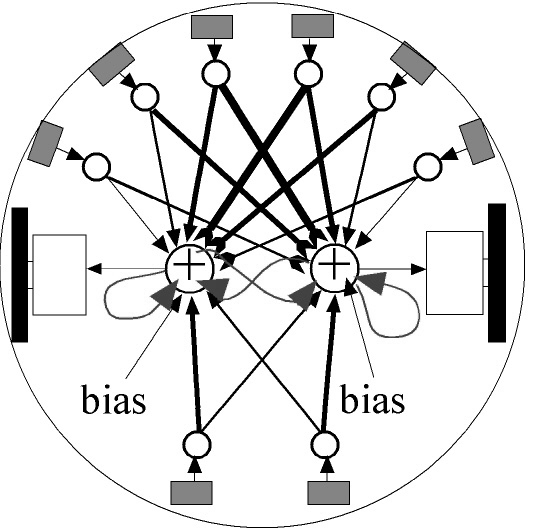
An important and difficult aspect of swarm-robotic system design is creating simple controllers for individual robots which efficiently accomplish the swarm’s goals. Designing such controllers by hand can be quite arduous and the resulting swarm behavior can sometimes be counter-intuitive. A potential alternative is to use machine learning algorithms to automatically generate near-optimal controllers for robots. We have explored using a distributed Particle Swarm Optimization implementation with artificial neural networks to allow robots to evolve several simple behaviors very quickly using parallel evolution. Although the motivation for this work is evolving search controllers for robots, it should be applicable for evolution of other types of behaviors.
Modeling and Experimental Validation of Distributed Robotic Search
Because of the high complexity and often lengthy runtime of experiments, it can be very useful to create abstracted models of swarm-robotic scenarios. These models can greatly facilitate systematic experimentation and allow for theoretical analysis of the impact of system parameters.
In swarm-robotic search, we explore modeling on two primary fronts. The first is model-inspired search, where the design of the robot controllers is guided by a search strategy from some other field or scenario, which can be used as an abstracted model of the system. Some exploration of using the Particle Swarm Optimization algorithm as an inspiring model has been completed.
The second front is to design models describing the system at multiple abstraction levels, ranging from accurate microscopic models describing the actions of each individual robot (e.g., realistic simulation) to highly-abstracted macroscopic models which describe the swarm as a whole. This approach has been successfully applied to several other swarm-robotic tasks ( Collective Manipulation and Collaborative Inspection ). Initial work on creating a multi-level model for swarm-robotic search has been done.
Team and Collaborators
- Jim Pugh
- Yizhen Zhang
Sponsors and Research Perios
Swiss National Science Foundation contract Nr. PP002-68647 (from October 2003-now)