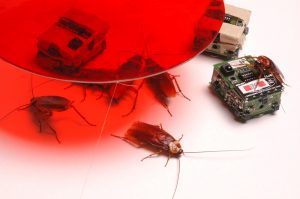
The project Leurre is sponsored by the Information Society Technologies program of the European Community and is aimed at the development of a general methodology to control animal societies by introducing animal-like robots.
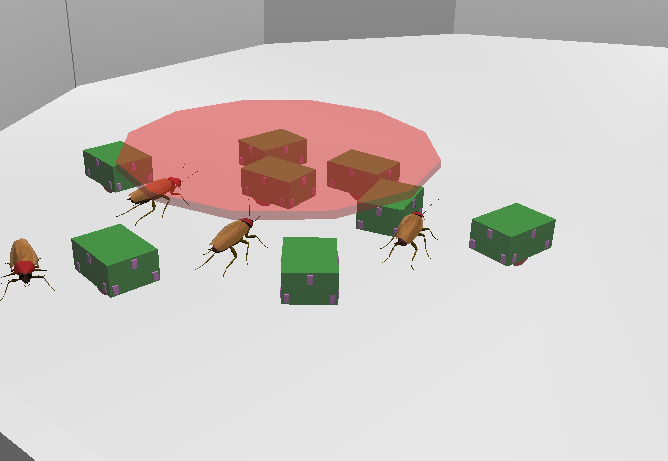
While experiments involving mixed societies of american cockroaches and Insbots are conducted at ULB, our group is concerned with developing models on various levels of abstractions (from realistic simulation to macroscopic difference equations) that help to understand the dynamics of aggregation and collective choices.
Finally, modeling can be used for finding ways for optimally controlling an animal society.
Additional Information regarding this project can be found here.
Team and Collaborators
In collaboration with:
- Jean-Marc Ame
- Masoud Asadpour
- Gilles Caprari
- Jean-Louis Deneubourg
- Jose Halloy
- Yuri Lopez de Meneses
Sponsors and Research Period
This project was sponsored by the European Project LEURRE