
Academic
2005 Master in micro-engineering
Activities
My main task at SWIS is to provide technical support to reserach and teaching activities. My R&D activities at SWIS are mainly concerned with system engineering and integration, hardware and firmware design, and mobile robotics design.
Here is an overview of my current R&D projects:
- Collaboration on the design of the E-Puck educational robotic platform.
- Design of a communication turret for the E-puck robot based on ZigBee.
- Software modification to the TinyOS embedded operating system in order to add dedicated hardware support.
- Design of local positioning and communication modules for multi-robot systems (with J. Pugh)
- Design of e-nose modules and plume generators for the distributed odor localization project (with T. Lochmatter).
Some pictures
The e-Puck robot with ZigBee communication module
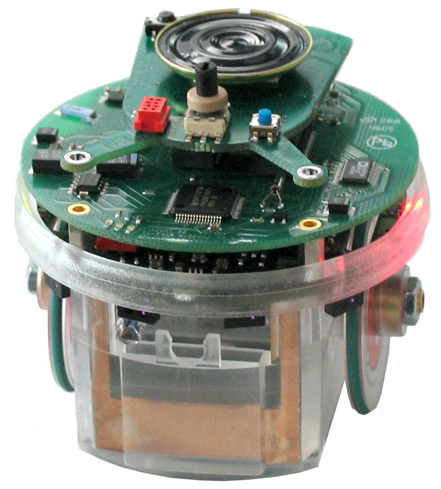
The ZigBee ready communication module
Publications
2009
The e-puck, a Robot Designed for Education in Engineering
F. Mondada; M. Bonani; X. Raemy; J. Pugh; C. Cianci et al.
2009. 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, May 7, 2009. p. 59-65. A Fast On-Board Relative Positioning Module for Multi-Robot Systems
J. Pugh; X. Raemy; C. Favre; R. Falconi; A. Martinoli
IEEE/ASME Transactions on Mechatronics, Focused Section on Mechatronics in Multi Robot Systems. 2009. Vol. 14, p. 151-162. DOI : 10.1109/TMECH.2008.2011810. 2008
A Comparison of Casting and Spiraling Algorithms for Odor Source Localization in Laminar Flow
T. Lochmatter; X. Raemy; L. Matthey; S. Indra; A. Martinoli
2008. 2008 IEEE International Conference on Robotics and Automation, Pasadena, California, May 19-23, 2008. p. 1138-1143. DOI : 10.1109/ROBOT.2008.4543357. 2007
Communication in a Swarm of Miniature Robots: The e-Puck as an Educational Tool for Swarm Robotics
C. M. Cianci; X. Raemy; J. Pugh; A. Martinoli
2007. Simulation of Adaptive Behavior (SAB-2006), Swarm Robotics Workshop, Rome, Italy, October, 2006. p. 103-115. DOI : 10.1007/978-3-540-71541-2_7. 2006
Self-Organized Embedded Sensor/Actuator Networks for ”Smart” Turbines
N. Correll; C. M. Cianci; X. Raemy; A. Martinoli
2006. IEEE/RSJ International Conference on Intelligent Robots and Systems Workshop on Network Robot System: Toward intelligent robotic systems integrated with environments, Beijing, China, October, 10.