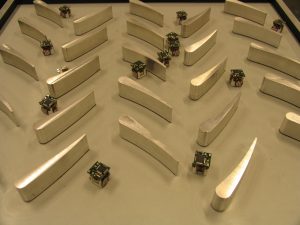
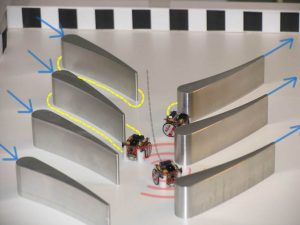
We investigate collaborative coverage with a self-organizing swarm of minimalist robots. The inspection of the compressor section of a (jet) turbine engine is a motivating case study (see IROS’06 and BSSAC’07 for a high-level overview).
Based on a simple, randomized solution in which robots do not collaborate (ISER’04), we introduce local communication among the robots in order to improve dispersion in the environment and thus speed up coverage progress (ISER’06).
As the individual robots are extremely unreliable due to sensor and actuator noise, we capture the dynamics of the swarm using probabilistic microscopic and macroscopic models (DARS’04, ICRA’05, DARS’06), which can serve as a prediction and design tool (SYROCO’06).
We contrast this approach with deliberative algorithms that theoretically provide complete coverage (ISER’06), but decay to probabilistic completeness due to sensor and actuator noise (ICRA’07). Currently, we are investigating collaborative approaches, where information about task progress is shared using a custom developed radio module running TinyOS, and offline algorithms that provided near-optimal coverage paths to the robot team.
Real robot experiments are carried out with a swarm of up to 40 Alice miniature robots, developed at the Autonomous Systems Laboratory by Gilles Caprari. For actual inspection and enhanced navigation/localization, we equipped the Alice platform with a miniature camera that allows us capturing 30×30 pixels RGB image at around 2Hz (video). We also use the realistic simulator Webots to systematically study the impact of different hardware constraints.
Team and Collaborators
NASA Glenn research Center (till September 2003)
Caltech Center for Neuromorphic Systems Engineering under the US NSF Cooperative Agreement ERC-9402726 (till September 2003).
Swiss National Science Foundation contract Nr. PP002-68647 (from October 2003-October 2007)
Videos
Supplementary Material
This document contains supplementary material to the paper “Distributed Coverage: From Deterministic to Probabilistic Models”, submitted to the International Conference on Robotics and Automation, Rome, 2006.
Publications
2017
Will robots be bodies with brains or brains with bodies?
Y. Mengüç; N. Correll; R. Kramer; J. Paik
Science Robotics. 2017. Vol. 2, num. 12, p. eaar4527. DOI : 10.1126/scirobotics.aar4527. 2016
2013
Evaluating Efficient Data Collection Algorithms for Environmental Sensor Networks
W. C. Evans; A. Bahr; A. Martinoli
2013. 10th International Symposium on Distributed Autonomous Robotic Systems, Lausanne, Switzerland, November 1-3, 2010. p. 77-89. DOI : 10.1007/978-3-642-32723-0_6. Self-Organized Robotic Systems: Large-Scale Experiments in Aggregation and Self-Assembly using Miniature Robots
G. Mermoud; A. Prorok; L. Matthey; C. M. Cianci; N. Correll et al.
Handbook of Collective Robotics; Singapore: Pan Stanford Publishing, 2013. p. 229-259. 2011
Multi-level Spatial Modeling for Stochastic Distributed Robotic Systems
A. Prorok; N. Correll; A. Martinoli
The International Journal of Robotics Research (IJRR). 2011. Vol. 30, num. 5, p. 574-589. DOI : 10.1177/0278364910399521. 2009
Collaborative coverage using a swarm of networked miniature robots
S. Rutishauser; N. Correll; A. Martinoli
Robotics and Autonomous Systems. 2009. Vol. 57, num. 5, p. 517-525. DOI : 10.1016/j.robot.2008.10.023. Distributed Boundary Coverage with a Team of Networked Miniature Robots using a Robust Market-Based Algorithm
P. Amstutz; N. Correll; A. Martinoli
Annals of Mathematics and Artificial Intelligence. 2009. Vol. 52, num. 2-4, p. 307-333. DOI : 10.1007/s10472-009-9127-8. Towards Multi-Robot Inspection of Industrial Machinery – From Distributed Coverage Algorithms to Experiments with Miniature Robotic Swarms
N. Correll; A. Martinoli
IEEE Robotics and Automation Magazine. 2009. Vol. 16, num. 1, p. 103-112. DOI : 10.1109/MRA.2008.931633. 2008
SwisTrack – A Flexible Open Source Tracking Software for Multi-Agent Systems
T. Lochmatter; P. Roduit; C. Cianci; N. Correll; J. Jacot et al.
2008. IEEE/RSJ 2008 International Conference on Intelligent Robots and Systems (IROS 2008), Nice, France, September 22-26, 2008. p. 4004-4010. DOI : 10.1109/IROS.2008.4650937. Parameter estimation and optimal control of swarm-robotic systems: A case study in distributed task allocation
N. Correll
2008. 2008 IEEE International Conference on Robotics and Automation, Pasadena, May 19-23, 2008. p. 3302-3307. DOI : 10.1109/ROBOT.2008.4543714. 2007
A Challenging Application in Swarm Robotics: The Autonomous Inspection of Complex Engineered Structures
N. Correll; A. Martinoli
Bulletin of the Swiss Society for Automatic Control. 2007. num. 46, p. 15-19. Modeling Self-Organized Aggregation in a Swarm of Miniature Robots
N. Correll; A. Martinoli
2007. IEEE 2007 International Conference on Robotics and Automation Workshop on Collective Behaviors inspired by Biological and Biochemical Systems, Rome, Italy, April 14. Robust Distributed Coverage using a Swarm of Miniature Robots
N. Correll; A. Martinoli
2007. IEEE International Conference on Robotics and Automation, Rome, Italy, April 10-14. p. 379-384. DOI : 10.1109/ROBOT.2007.363816. 2006
Self-Organized Embedded Sensor/Actuator Networks for ”Smart” Turbines
N. Correll; C. M. Cianci; X. Raemy; A. Martinoli
2006. IEEE/RSJ International Conference on Intelligent Robots and Systems Workshop on Network Robot System: Toward intelligent robotic systems integrated with environments, Beijing, China, October, 10. SwisTrack: A Tracking Tool for Multi-Unit Robotic and Biological Systems
N. Correll; G. Sempo; Y. Lopez de Meneses; J. Halloy; J-L. Deneubourg et al.
2006. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing, China, October, 9-15. p. 2185-2191. DOI : 10.1109/IROS.2006.282558. Comparing Coordination Schemes for Miniature Robotic Swarms: A Case Study in Boundary Coverage of Regular Structures
N. Correll; S. Rutishauser; A. Martinoli
2006. The 10th International Symposium on Experimental Robotics (ISER), Rio de Janeiro, Brazil, July 6-10. p. 471-480. DOI : 10.1007/978-3-540-77457-0_44. Towards Optimal Control of Self-Organized Robotic Inspection Systems
N. Correll; A. Martinoli
2006. 8th International IFAC Symposium on Robot Control (SYROCO), Bologna, Italy, September 6-8. DOI : 10.3182/20060906-3-IT-2910.00052. System Identification of Self-Organizing Robotic Swarms
N. Correll; A. Martinoli
2006. The 8th Int. Symp. on Distributed Autonomous Robotic Systems (DARS), Minneapolis/St. Paul, Minnesota, USA, July 12-14. p. 31-40. DOI : 10.1007/4-431-35881-1_4. Collective Inspection of Regular Structures using a Swarm of Miniature Robots
N. Correll; A. Martinoli
2006. The 9th Int. Symp. on Experimental Robotics (ISER), Singapore, June 18-21. p. 375-385. DOI : 10.1007/11552246_36. Modeling and Optimization of a Swarm-Intelligent Inspection System
N. Correll; A. Martinoli
2006. Int. Symp. on Distributed Autonomous Robotic Systems (DARS), Toulouse, France, June 23-25. p. 369-378. DOI : 10.1007/978-4-431-35873-2_36. 2005
Modeling and Analysis of Beaconless and Beacon-Based Policies for a Swarm-Intelligent Inspection System
N. Correll; A. Martinoli
2005. IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, April 18-22. p. 2488-2493. DOI : 10.1109/ROBOT.2005.1570484.