User-driven distributed control of collective assembly using mobile, networked miniature robots
If swarm systems are to be used in human environments, a protocol for human-swarm interaction has to be defined to enable direct and intuitive control by users. Up to now research has concentrated on the difficult problem of controlling the swarm, whereas the interaction problem has been largely overlooked.
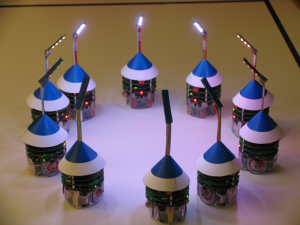
In collaboration with interaction design researchers, the project developed a demonstrator consisting in a fleet of mobile “lighting” robots moving on a large table, such that the swarm of robots form a “distributed table light”. In the presence of human users, the group of robots quickly aggregates to form together a lamp whose shape and function depends on the users’ positions and behaviors.
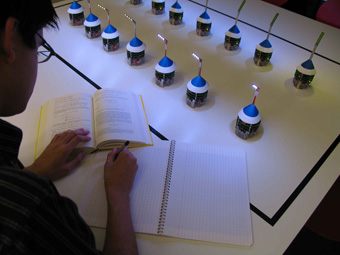
The whole set-up consists in a collection of small robots moving and interacting on a table, a camera position tracker and a human-computer interface. The swarm-user interaction is designed as follows: the target configuration of the aggregate is controlled through crude position and attitude tracking of users around the table. User tracking and robot tracking are integrated in software and configuration information as well as positioning information are then sent to the robots.
Considering the specific task of ordered aggregation as benchmark, the project studies a simple algorithm able to control the geometry of an aggregate consisting of embedded, real-time, self-locomoted robotic units endowed with limited computational and communication capabilities. The robots only use infrared proximity sensors and wireless communication.
In this case, the aggregation problem being human centered, time-to-completion becomes critical. The user cannot accept to wait too long for the robots to aggregate. The system has to react quickly to changes in users attitude. This is the reason for defining a hybrid algorithm where global positionnal information is sent to the robots, which then accordingly choose their actions in an autonomous manner.
The project results from a collaboration with designers from Ecole Cantonale d’Art de Lausanne
SAILS Project

At a crossroad between Art and Science, the SAILS project aims to bring together researchers in both artistic and scientific domains to collaborate towards the production of a robotic environment dedicated to architectural research. Following his interest in studying the formation of urban landscapes in unplanned settlements as well as the use of Artificial Life models in producing architectural shapes, Nicolas Reeves has chosen to study the potential for swarm-intelligence models to produce self-organised three-dimensional structures of architectural relevance. As demonstrated by Bonabeau and Theraulaz in their investigation of self-organised nest building (Bonabeau et al. 2000), local rules are sufficient to produce complex structures through the help of stigmergic interactions.
The project consist of designing self-assembling behaviours for indoor cubic robotic blimps and will involve in its final stage 12 to 20 flying cubes. Complex structures will emerge from these interactions with robots self-configuring into a pattern and then reconfiguring into another.
To tackle the difficulties inherent in this project, a multi-level design methodology has been adopted, such that the development of the Mascarillons is undertaken in parallel, on several experimental levels:
- Realistic macroscopic models relying on Markov formalism, allowing mathematical tractability and analysis of the overall system dynamics.
- Microscopic modeling to investigate the `time of completion’ constraint.
- Realistic sensor- and actuator-based simulation to investigate lower-level system parameter influences and control loops taking into account aerodynamics, inertia and noisy, non-linear sensors and actuators.
- multi-robot real platform, target implementation crucial for the parameterisation of all levels of abstraction. It dictates the limitations of a given implementation that need to be echoed in the abstract models. It also provides a testbed for confirmation of results.

Team and Collaborators
In collaboration with:
- Patrick Keller, ECAL / fabric|ch
- Christian Babski, fabric|ch
- Prof. Nicolas Reeves
- Prof. Alan Winfield
Additional Information
SAILS project official website
Students projects related to this research
Developing Distributed Aggregation Strategies with User-Interactive Robotic Swarm