Fluid-Mediated Programmable Self-Assembling of Robotic Modules
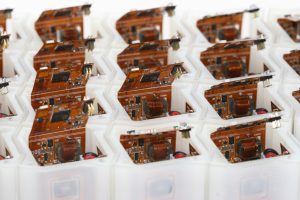
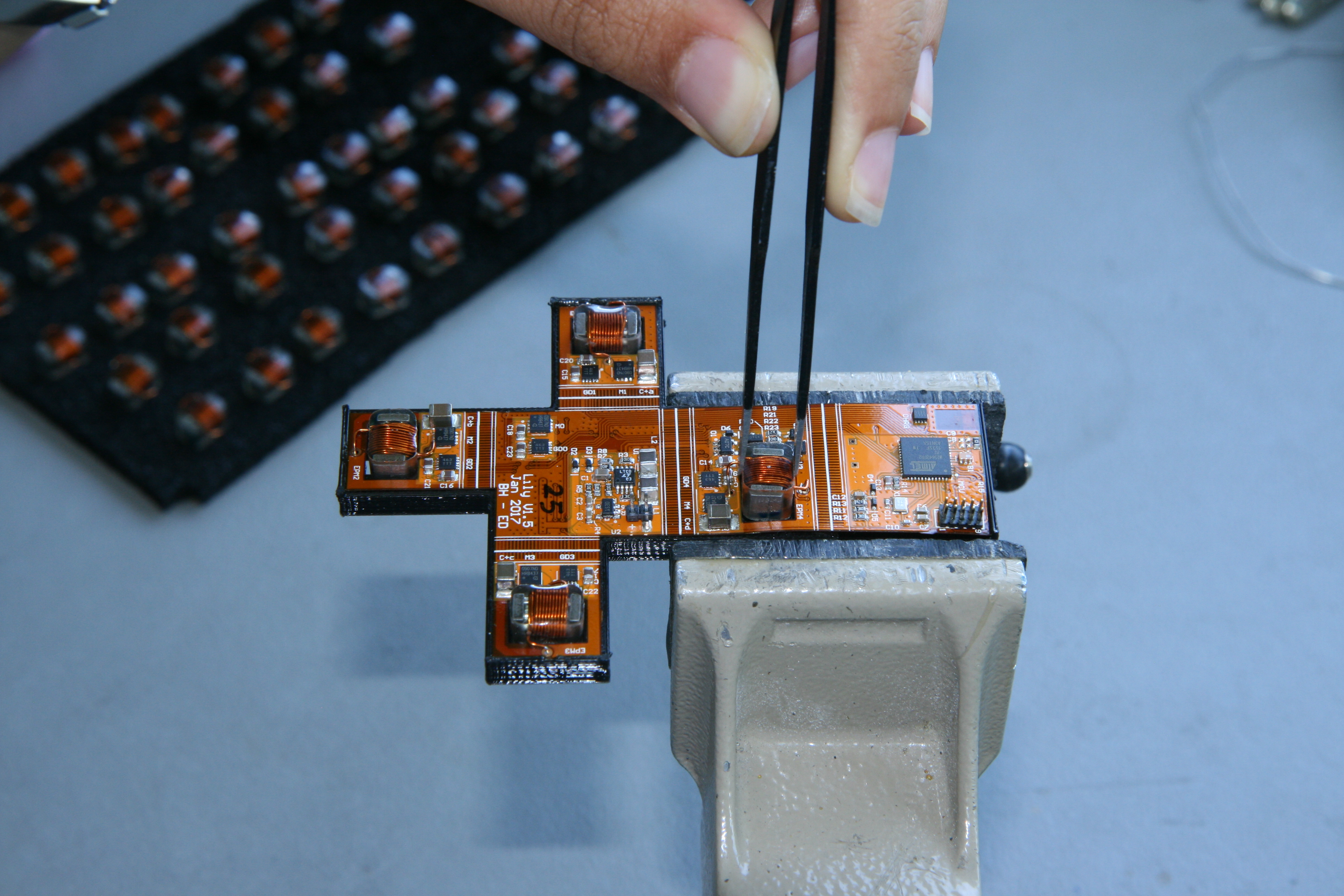
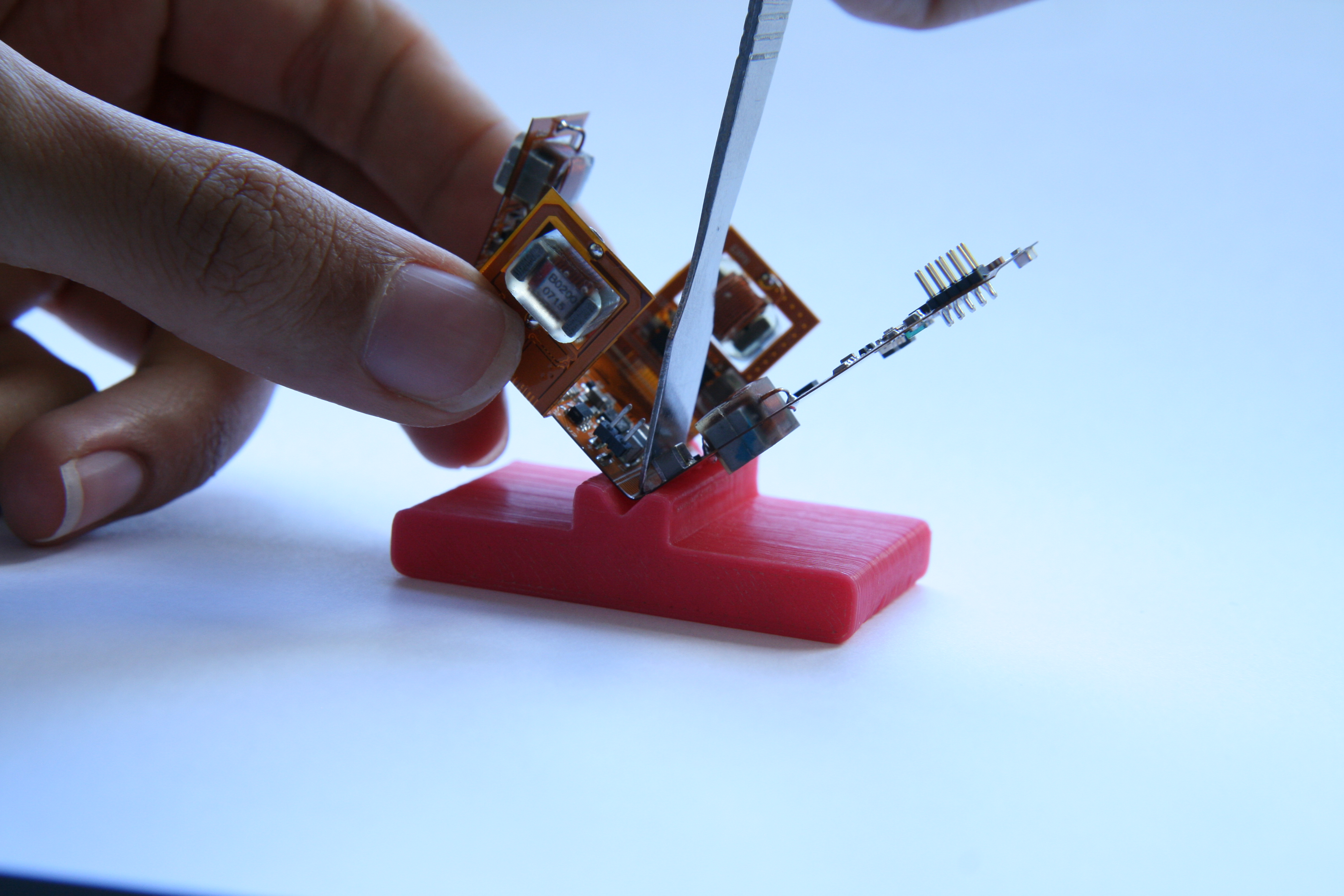
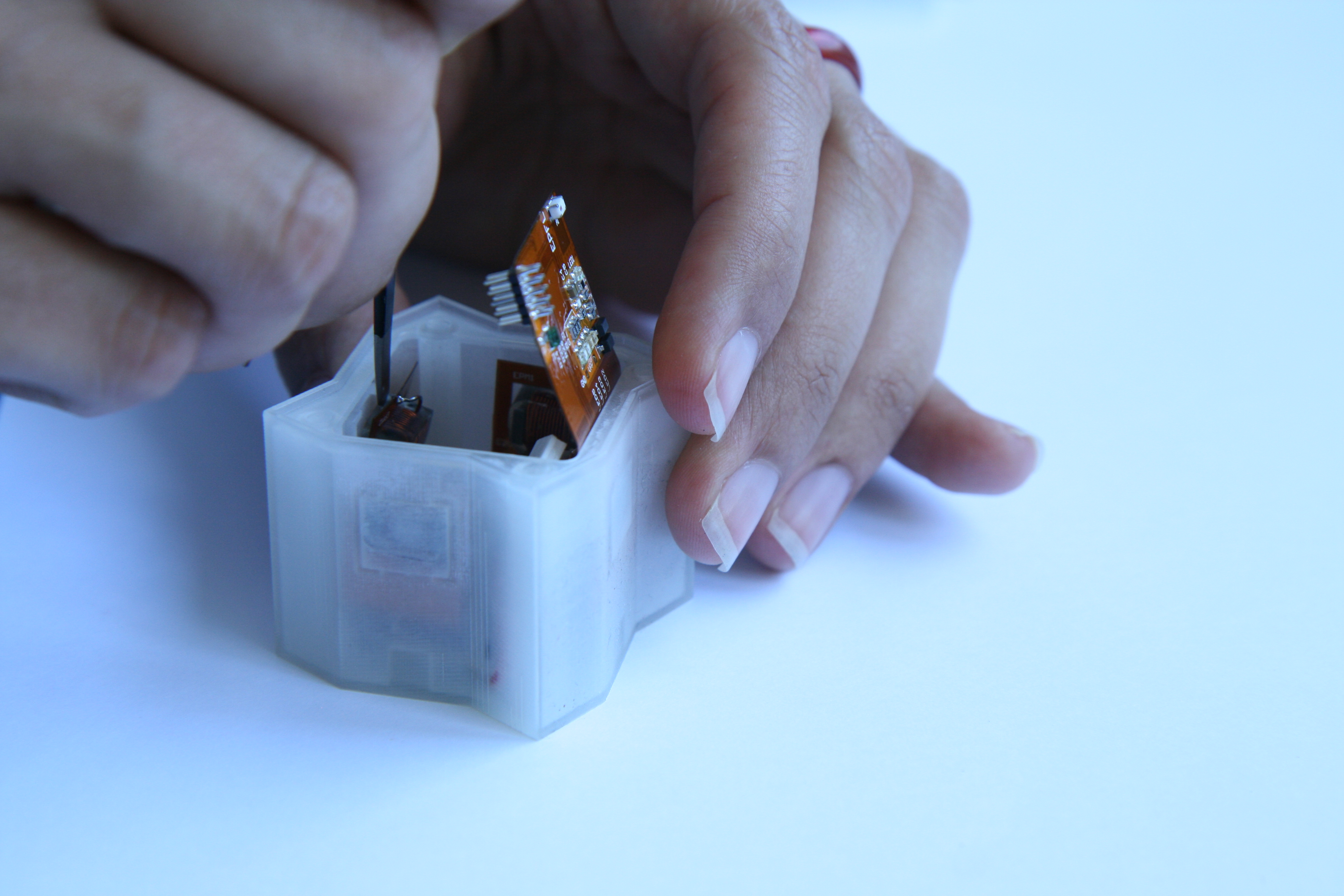
Programmable self-assembly of miniature robotic modules provides a promising means for realizing programmable matter. This project is focused on programmable stochastic self-assembly of robotic modules in an aquatic environment. The project is basically divided into two main research thrusts: (i) a technological research thrust concerned with the design, the fabrication, and the packaging of the experimental platform, and (ii) a theoretical research thrust concerned with the development of distributed, stochastic control schemes supported by a flexible modeling framework. Such a modeling framework shall enable to predict and optimize the dynamics of the proposed distributed robotic platform as a function of a large variety of design and control parameters, therefore strongly linking the two research thrusts.
The expected outcomes of this project are two-fold. First, our research consolidates and improve the design of centimeter-sized distributed robotic platforms based on mechatronic technology. Second, we aim at updating and extending state-of-the-art methodologies for designing, modeling, and controlling massively distributed, stochastic robotic systems. This project is definitely oriented towards basic research: even though it aims at delivering concrete demonstrators, it does not yet target any specific application.d confined in 2D.
2019.14th International Symposium on Distributed Autonomous Robotic Systems (DARS), Boulder, Colorado, USA, October 15-17, 2018. p. 197-210. DOI : 10.1007/978-3-030-05816-6_14.
2019.13th International Symposium on Distributed Autonomous Robotic Systems (DARS), London, ENGLAND, Nov 07-09, 2016. DOI : 10.1007/978-3-319-73008-0_23.
2017.IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, Canada, September 24–28, 2017. p. 4656-5663. DOI : 10.1109/IROS.2017.8206337.
2016.IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, October 9-14, 2016. p. 2778-2783. DOI : 10.1109/IROS.2016.7759431.