February 15, 2010
Abstract
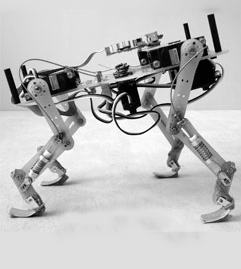
This project relates to the locomotion of Cheetah , a small and light robot, who features tri- segmented, biologically inspired, compliant legs. It is a continuation of former B I R G students projects, who brought the conception of two simulated model and two prototypes.
This project focuses on the simulation aspect, where a Central Pattern Generator (CPG) is used to abstract the control of the locomotion, and evolutionary algorithms are used to perform offline learning with a model of the robot in the WEBOTS simulator.
At first, the model of the robot has been improved to be more accurate toward the prototypes, particularly on the level of the asymmetric compliant behavior of the leg. Afterwards the control software has been carried out with the use of new Optimization and CPG framework developed at BIRG . Then an implementation of locomotion self-stabilization principles, observed in quadrupedal locomotion, has been introduced inside a Central Pattern Generator previously designed by Ludovic RIGHETTI. Finally, the extensive study of a learned trot gait has been completed, measuring the benefit of the implementation of such behaviors.
Report and Presentations
Videos
All videos are playable with VLC 1.0.1
 |
ODE unrealistic behavior. In the presence of two closed mechanical loop in the knee mechanism, there is too much constraint leading to bad mathematical integration of the simulation. Here speed is realtime. |
 |
Learned trot without sensory feedback. |
 |
Learned trot with sensory feedback, without leg retraction. |
Code and Documentation
You can download all the sources of the project on the public git repository : http://code.akay.fr/Cheetah.git
For this purpose, just type the following command :
The documentation can be found in doxygen format under Cheetah/Documentation .
You can browse the documentation online at this place.