Salamandra robotica II
 We are glad to show Salamandra robotica II, the new generation of our amphibious salamander-like robot. The robot is described in an article published in IEEE Transactions in Robotics, and has been invited to the Innorobo 2013 robotics exbibition that took place from March 19th to March 21st 2013 in Lyon.
We are glad to show Salamandra robotica II, the new generation of our amphibious salamander-like robot. The robot is described in an article published in IEEE Transactions in Robotics, and has been invited to the Innorobo 2013 robotics exbibition that took place from March 19th to March 21st 2013 in Lyon.
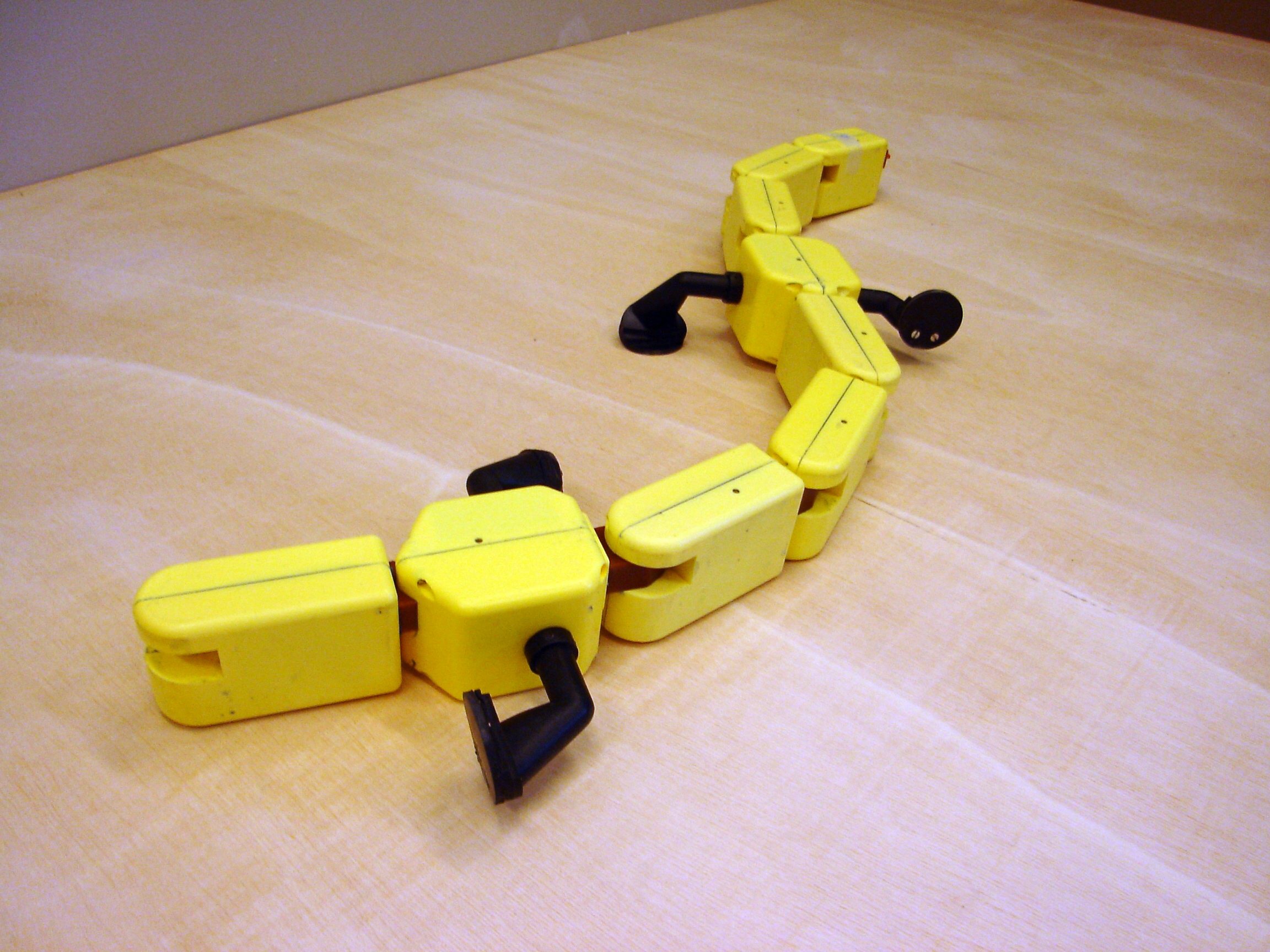
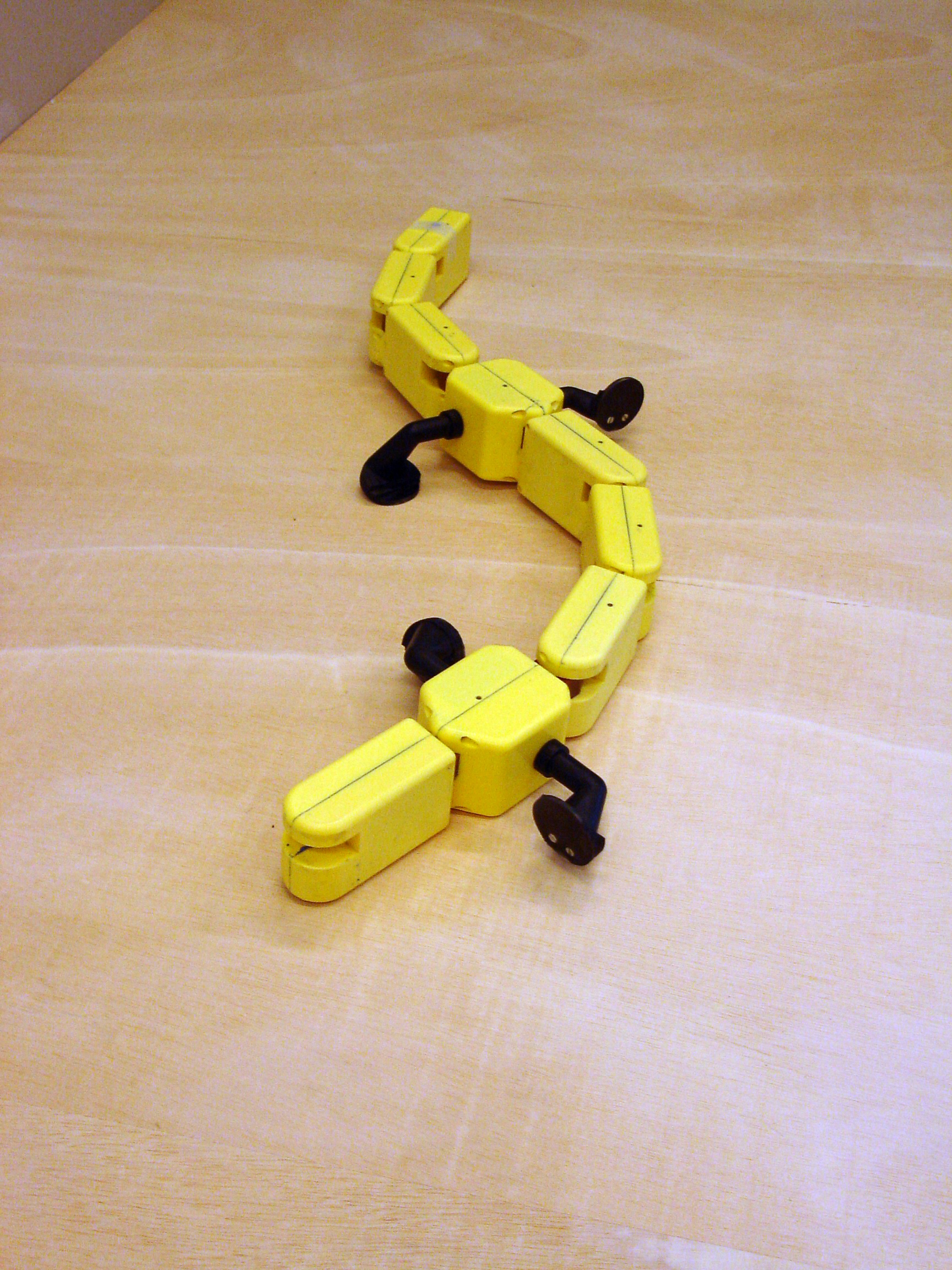
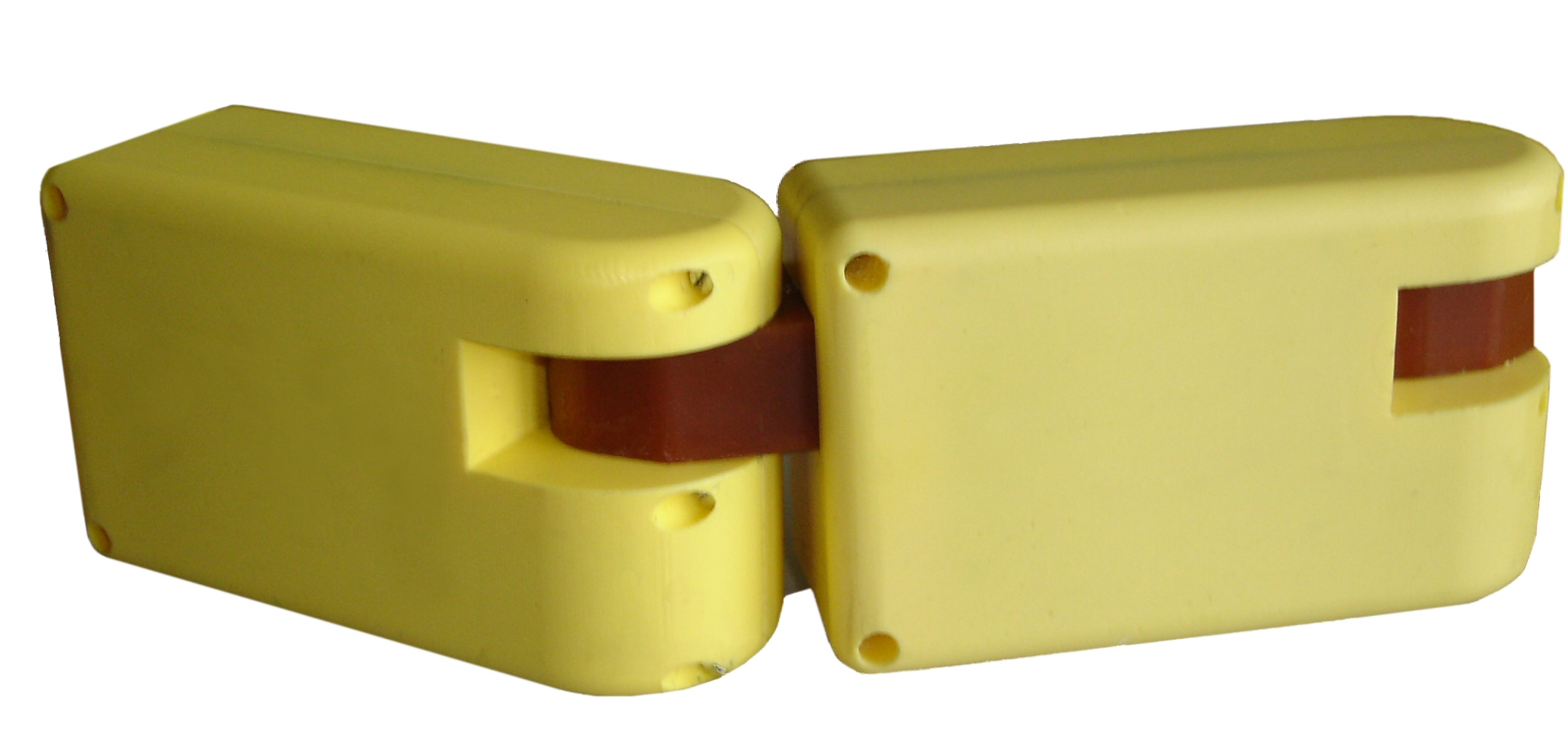
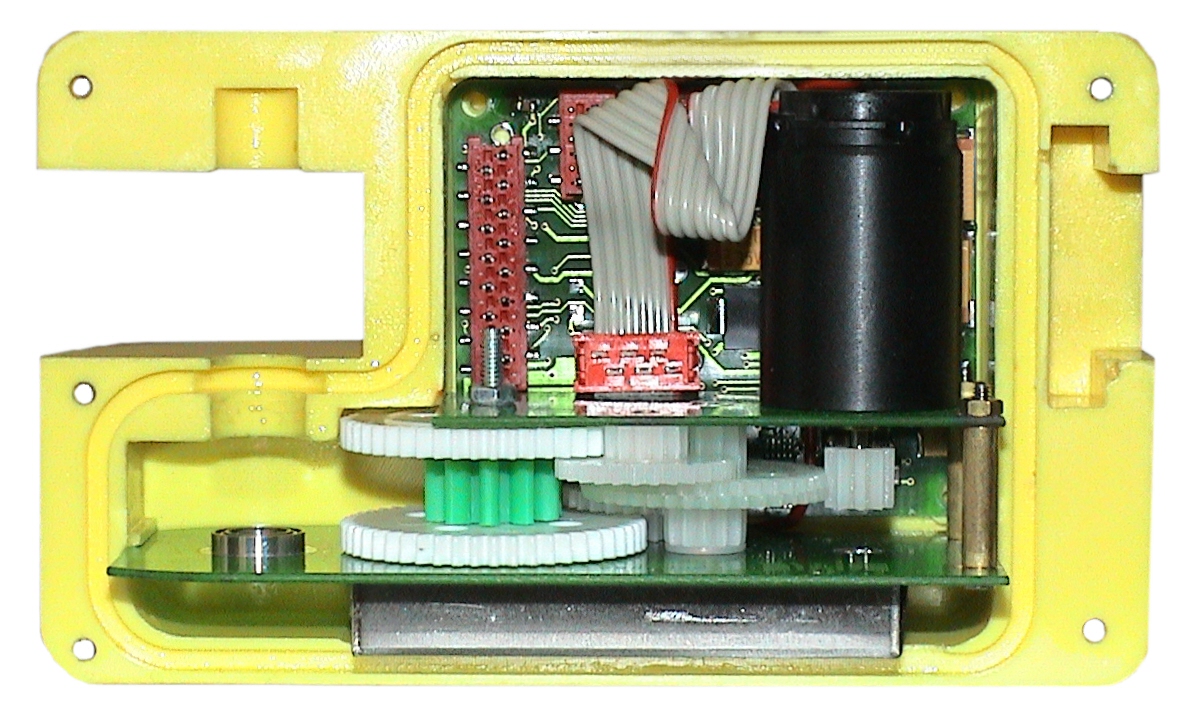
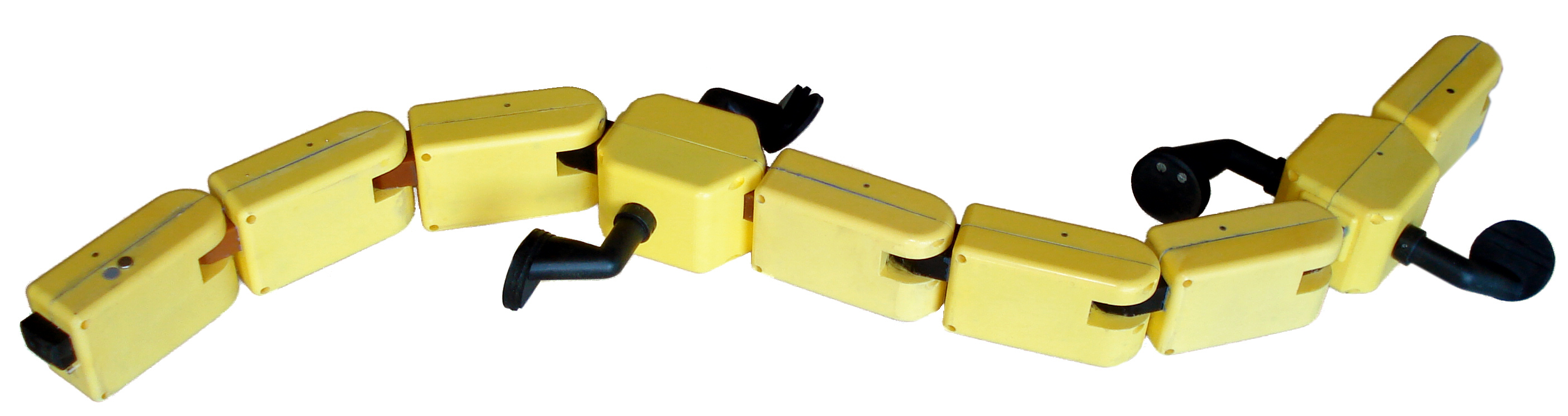
Compared to its predecessor Salamandra robotica (see below), the new robot swims more than twice as fast, is equiped with foldable limbs, and embarks more powerful microcontrollers that allow distributed computation of our models of spinal cord neural networks as well as the simulation of muscle properties. It is one of the few robots, if not the only one, that can swim, crawl, and walk. Its modular design allow us to rapidly change its morphology (e.g. make it longer, add or remove legs, etc.). Also its modularity means that each module has its own microcontroller, battery, and motors, and therefore we can split the robot in different parts and it would still work. This can have interesting implications in terms of robustness against damage. For instance, the robot could loose parts of its body and still be able to walk. See a movie below.
The primary purpose of this robot is to serve as a scientific tool to test hypotheses about the neural circuits underlying locomotion in the spinal cord of vertebrate animals. For this, we work with neurobiologists, in particular Prof. Jean-Marie Cabelguen from the University of Bordeaux, and make models of the central pattern generators that are known to control locomotion in vertebrate animals. These sophisticated circuits can produce complex locomotor patterns while receiving only simple command signals from upper parts of the brain. Read more about this below (e.g. an article that appeared in Science in 2007).
A second purpose of the robot is to pave the way for amphibious service robots that could be used for inspection tasks or for search-and-rescue missions (e.g. after an earthquake, flood, or mudslide).
Scientific publication:
Crespi, A.; Karakasiliotis, K.; Guignard, A.; Ijspeert, A. J., “Salamandra Robotica II: An Amphibious Robot to Study Salamander-Like Swimming and Walking Gaits”, IEEE Transactions on Robotics, vol. 29, no.2, pp. 308-320, doi: 10.1109/TRO.2012.2234311. Available online at URL: https://dx.doi.org/10.1109/TRO.2012.2234311
Salamandra robotica II at Innorobo 2013 (low res):




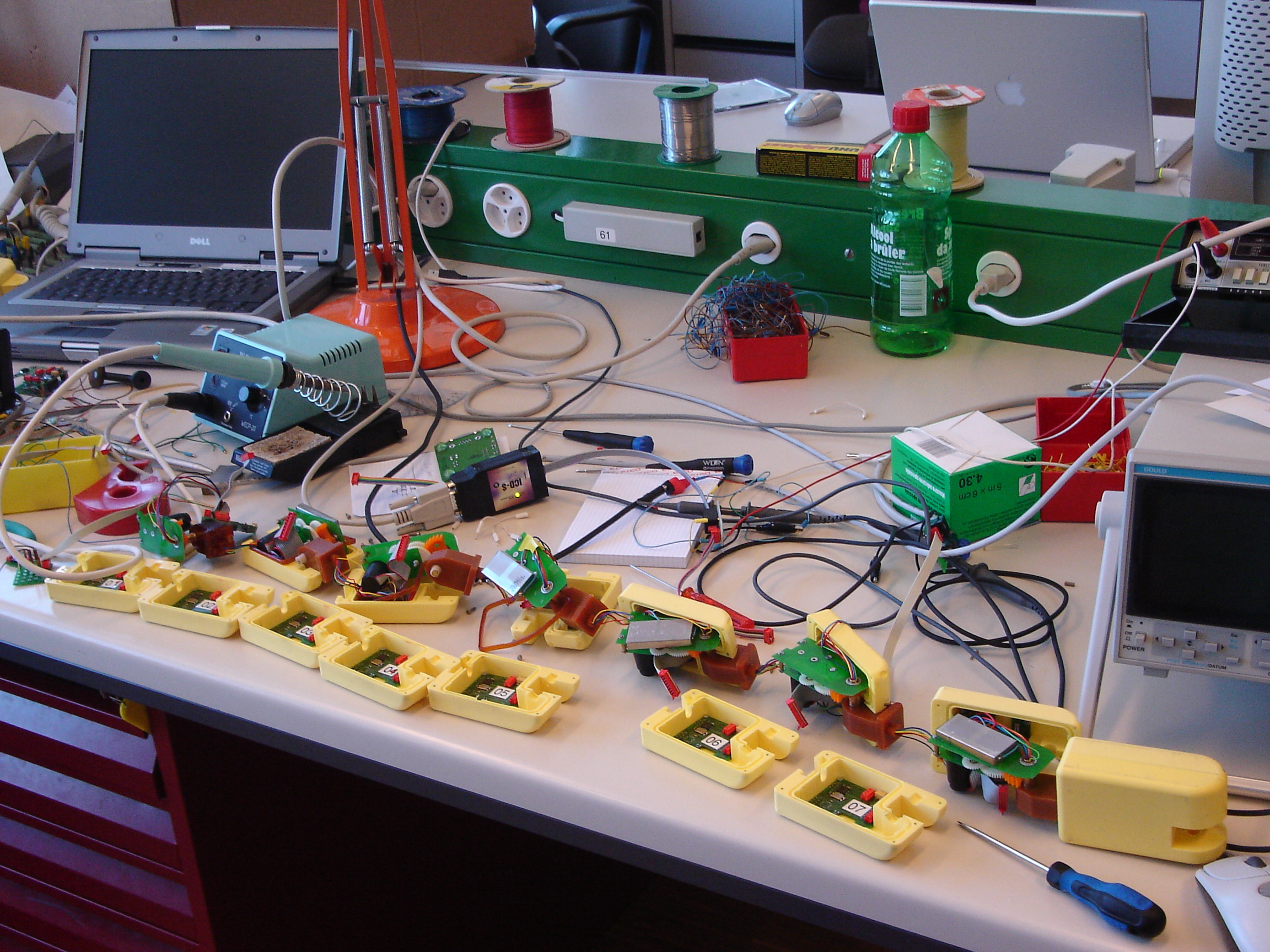
Pictures of the new robot (low res):

Credits: Kostas Karakasiliotis, Biorobotics Laboratory, EPFL.
Pictures of the new robot (high res):
{kind=link}
{kind=link}
{kind=link}
Movies of the new robot: (HD versions available on request)
Salamandra robotica II swimming and walking at Innorobo
Salamandra robotica II outdoors
Salamandra robotica II with distributed controller
Salamandra robotica II walking
Salamandra robotica II at Innorobo
Feel free to use pictures without prior permission provided they are credited as follows: Kostas Karakasiliotis, Biorobotics Laboratory, EPFL.
From swimming to walking with a salamander robot driven by a spinal cord model (Science 2007)
 This page describes a model of the salamander locomotor circuit and its implementation in our salamander-like robot: Salamandra robotica. This work appears in Science’s March 9 2007 issue. It extends previous work we did on salamander locomotion using neuromechanical simulations.
This page describes a model of the salamander locomotor circuit and its implementation in our salamander-like robot: Salamandra robotica. This work appears in Science’s March 9 2007 issue. It extends previous work we did on salamander locomotion using neuromechanical simulations.
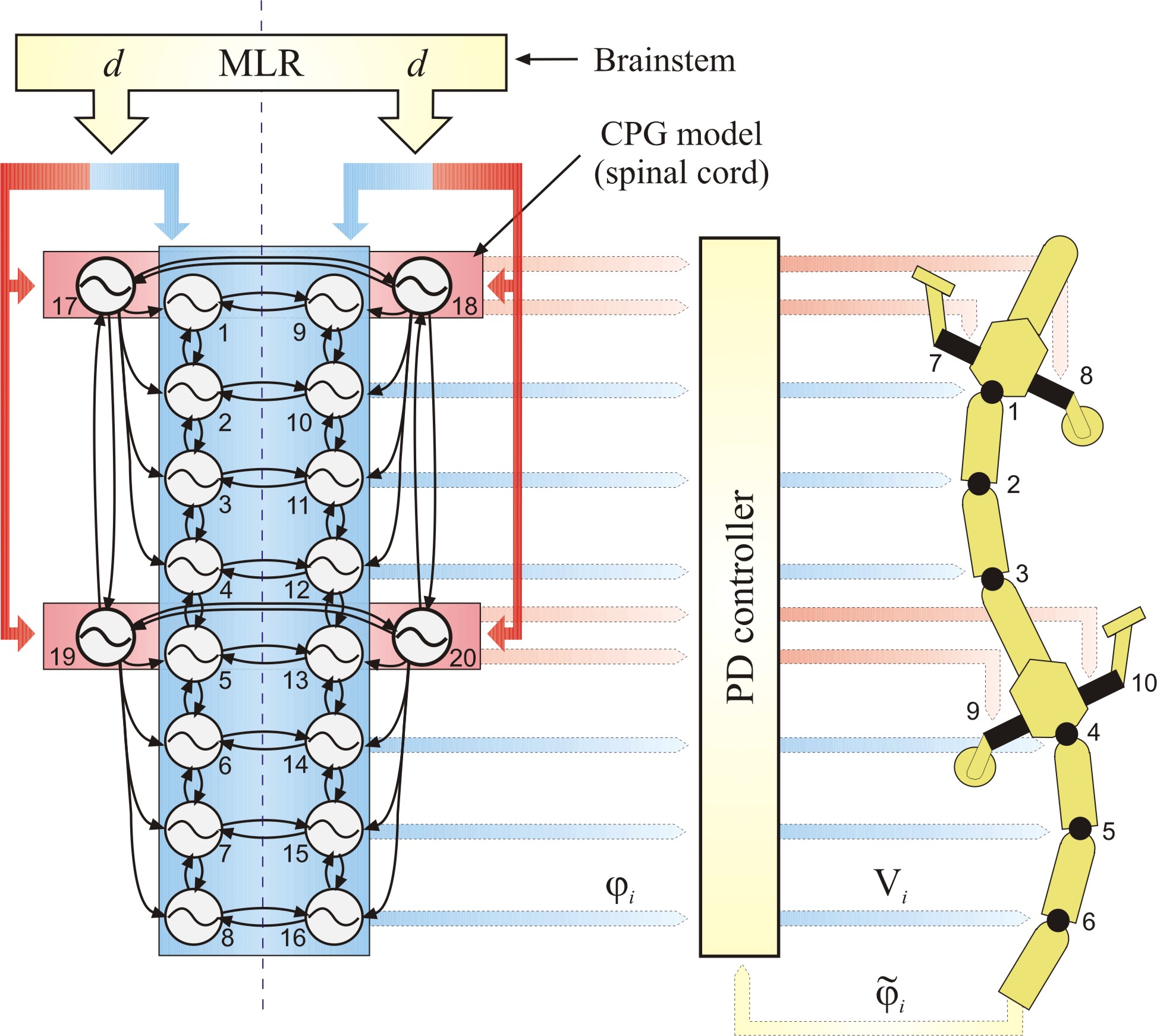
Using the salamander as an animal model, we address three fundamental issues related to vertebrate locomotion: (i) the modifications undergone by the spinal locomotor circuits during the evolutionary transition from aquatic to terrestrial locomotion, (ii) the mechanisms necessary for coordination of limb and axial movements, and (iii) the mechanisms that underlie gait transitions induced by simple electrical stimulation of the brain stem. We address these questions with the help of a numerical model of the salamander’s spinal cord that we implement and test on a novel salamander-like robot capable of swimming and walking. Consequently, this study is also a demonstration of how robots can be used to test biological models, and in return, how biology can help designing robot locomotion controllers.
The model simulates the central pattern generator (CPG, i.e. a circuit capable of producing coordinated patterns of rhythmic neural activity) underlying locomotion in the spinal cord. It is implemented as a system of coupled nonlinear oscillators and runs on a microcontroller on board of the amphibious robot. To the best of our knowledge it is the first robot that combines the three modes of locomotion — swimming, serpentine crawling and walking — in a single robot. Simple drive signals are sent wirelessly from a laptop to the robot to modulate locomotion, similarly to how upper centers in the brain send simple signals to the spinal cord for initiating and modulating locomotion. The purpose of the robot is three-fold: (i) to show that our CPG model can generate forward motion with variable speed and heading (i.e., aspects that need a “body” for validation and cannot be studied at a neuronal level alone), (ii) to qualitatively compare the gaits generated to those of the real salamander, and (iii) to show that the concept of CPGs can lead to robust locomotion control for robots with multiple articulated joints.
Our work demonstrates that the spinal cords contains rather sophisticated neural circuits that can control complex locomotion while receiving only high-level command signals. In particular, we demonstrate how a primitive neural circuit for swimming like the one found in the lamprey can be extended by phylogenetically more recent limb oscillatory centers to explain the ability of salamanders to switch between swimming and walking. Our work also suggests a mechanism that explains how gait transition between swimming and walking can be obtained by simply varying the level of stimulation of the brain stem. The mechanism is based on two hypotheses: (1) that limb oscillatory centers are slower than body oscillatory centers, and (2) that limb oscillatory centers saturate (i.e. stop oscillating) when receiving a high level of drive. The first hypothesis had been confirmed with new biological experiments (see the Sup. Mat. on the Science website). This type of automatic gait transition induced by simple electrical stimulation has been observed in many vertebrates but is yet poorly understood. Additionally our model explains how the coordination between body and limbs is maintained during locomotion. Finally, the model also gives a potential explanation of how salamanders control their speed and direction of locomotion, by respectively modulating the level and the asymmetry of drive applied to the spinal cord.
People involved: Auke Ijspeert, Alessandro Crespi, Kostas Karakasiliotis, Jeremie Knuesel, André Guignard, André Badertscher, Jean-Marie Cabelguen (Univ. of Bordeaux), Dimitri Ryczko (Univ. of Bordeaux 2).
Image and Video use
Images and videos on this web page can be used without prior permission, provided they are credited as follows:
Technical figures: “Figure by A. Ijspeert, courtesy Biorobotics Laboratory, EPFL”
Pictures: “Photograph by XXX, courtesy Biorobotics Laboratory, EPFL” where XXX is A. Herzog if a_herzog is in the name of the file, A. Badertscher if a_badertscher is in the name of the file, and A. Crespi otherwise.
Videos: “Video by YYY, courtesy Biorobotics Laboratory, EPFL”. Similarly YYY is E. Bastian if e_bastian is in the name of the file and A. Crespi otherwise. Please contact us by email at auke.ijspeert at epfl.ch or alessandro.crespi at epfl.ch if you would like additional information or higher resolution videos.
Sample animations/movies
The AVI files require the Xvid codec (see http://www.xvid.org) if your player does not support it directly (most modern players should).
Salamander robot coming out of Lake Geneva: (MPG, 3.0MB) (AVI xvid, 5.3MB)
Salamander robot swimming in the Lake Geneva: (MPG, 4.1MB) (AVI xvid, 3.7MB)
From swimming to walking, back view: (MPG, 4.9MB)(AVI xvid, 4.2MB)
From swimming to walking, lateral view: (MPG, 1.5MB) (AVI xvid, 1.4MB)
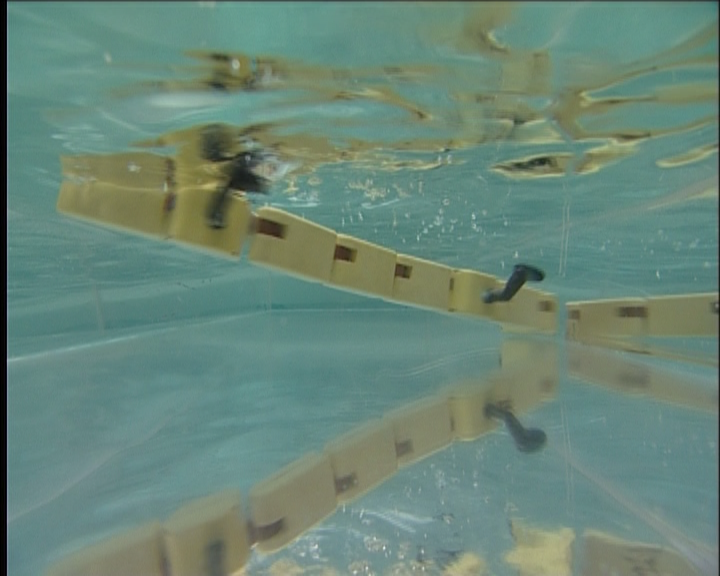
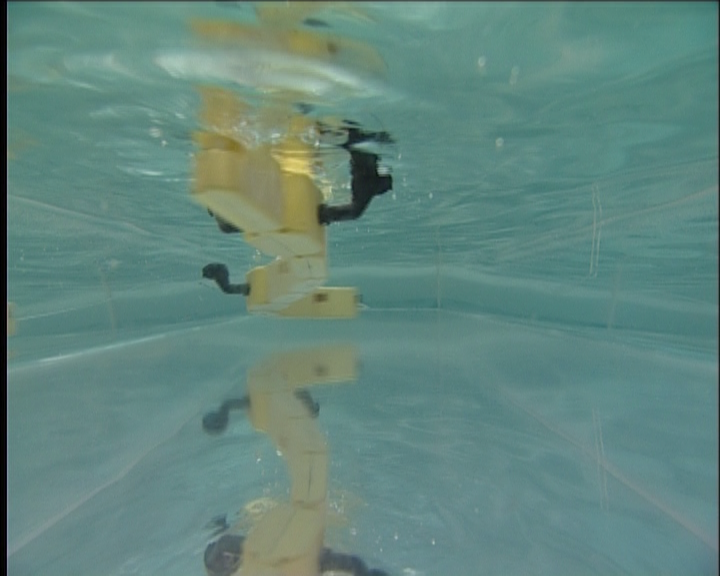
From swimming to walking, underwater view: (MPG, 1.6MB) (AVI xvid, 2.6MB)
Swimming, underwater view: (MPG, 1.6MB) (AVI xvid, 4.0MB)
Salamander robot walking on concrete: (MPG, 10.0MB) (AVI xvid, 9.1MB)
Salamander robot walking at variable speed: (MPG, 9.5MB) (AVI xvid, 8.7MB)
Salamander robot walking towards the camera: (MPG, 6.2MB) (AVI xvid, 5.6MB)
A good body-limb coordination leads to faster walking: (MPG, 5.2MB) (AVI xvid, 4.8MB)
Control of direction during walking: (MPG, 10.8MB) (AVI xvid, 8.9MB)
Serpentine crawling (swimming on ground, like a salamander trying to escape on grass): (MPG, 6.4MB) (AVI xvid, 3.0MB)
Locomotion of a real salamander, movie S1 of the Sup. Mat.: (Quicktime, 4.3MB)
Locomotion of the salamander robot driven by the spinal cord model, movie S2 of the Sup. Mat.: (Quicktime, 37.1MB)
AmphibotII amphibious lamprey/snake robot (article to be presented at ICRA2007): (MPG, 4.6MB)
Low resolution pictures (click on the thumbnails)

















 <!–
<!–  –> <!–
–> <!–  –> <!–
–> <!–  –>
–> 
High resolution pictures (between 4.0 and 15.0 MB, same order as above)
a_herzog_lake8.jpg, a_herzog_lake1.jpg, a_herzog_lake2.jpg, a_herzog_lake3.jpg, a_herzog_lake4.jpg, a_herzog_lake5.jpg, a_herzog_lake6.jpg, a_herzog_lake7.jpg, a_herzog_lake9.jpg, a_herzog_outside1.jpg, a_herzog_outside2.jpg, a_herzog_outside3.jpg, a_herzog_lab1.jpg, a_herzog_lab2.jpg, a_herzog_lab3.jpg
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Related publications
A.J. Ijspeert, A. Crespi, D. Ryczko, and J.M. Cabelguen. From swimming to walking with a salamander robot driven by a spinal cord model. Science, 9 March 2007, Vol. 315. no. 5817, pp. 1416 – 1420, 2007. Full text and supporting online material, Movie S1 (Quicktime, 4.3MB), Movie S2(Quicktime, 37.1MB)
A.J. Ijspeert, A. Crespi, and J.M. Cabelguen. Simulation and robotics studies of salamander locomotion. Applying neurobiological principles to the control of locomotion in robots. Neuroinformatics, 3(3):171-196, 2005.
[ bib | .pdf ]
A.J. Ijspeert. A connectionist central pattern generator for the aquatic and terrestrial gaits of a simulated salamander. Biological Cybernetics, 84(5):331-348, 2001.
[ bib | .ps.gz | .pdf ]