Robot Description
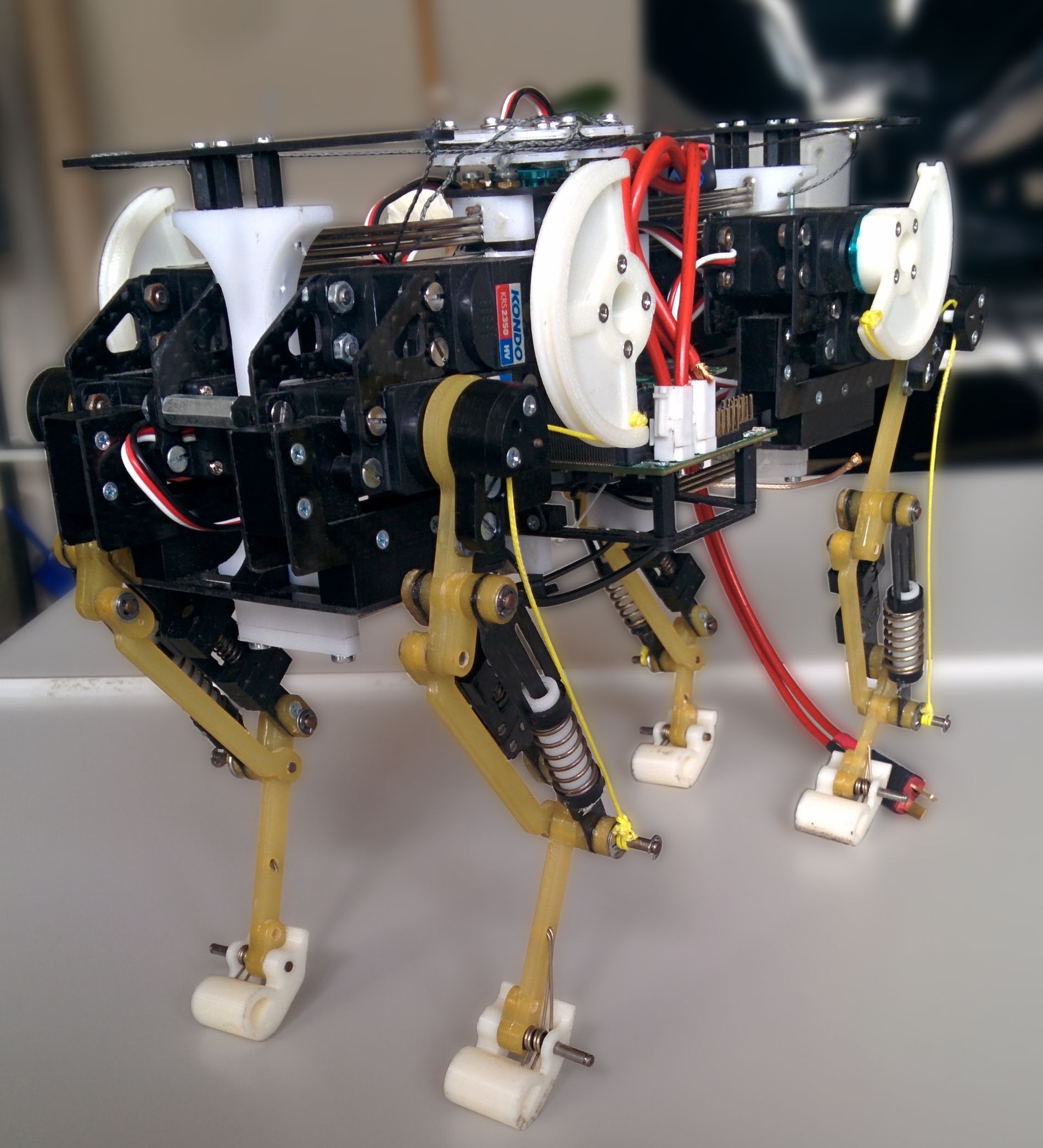
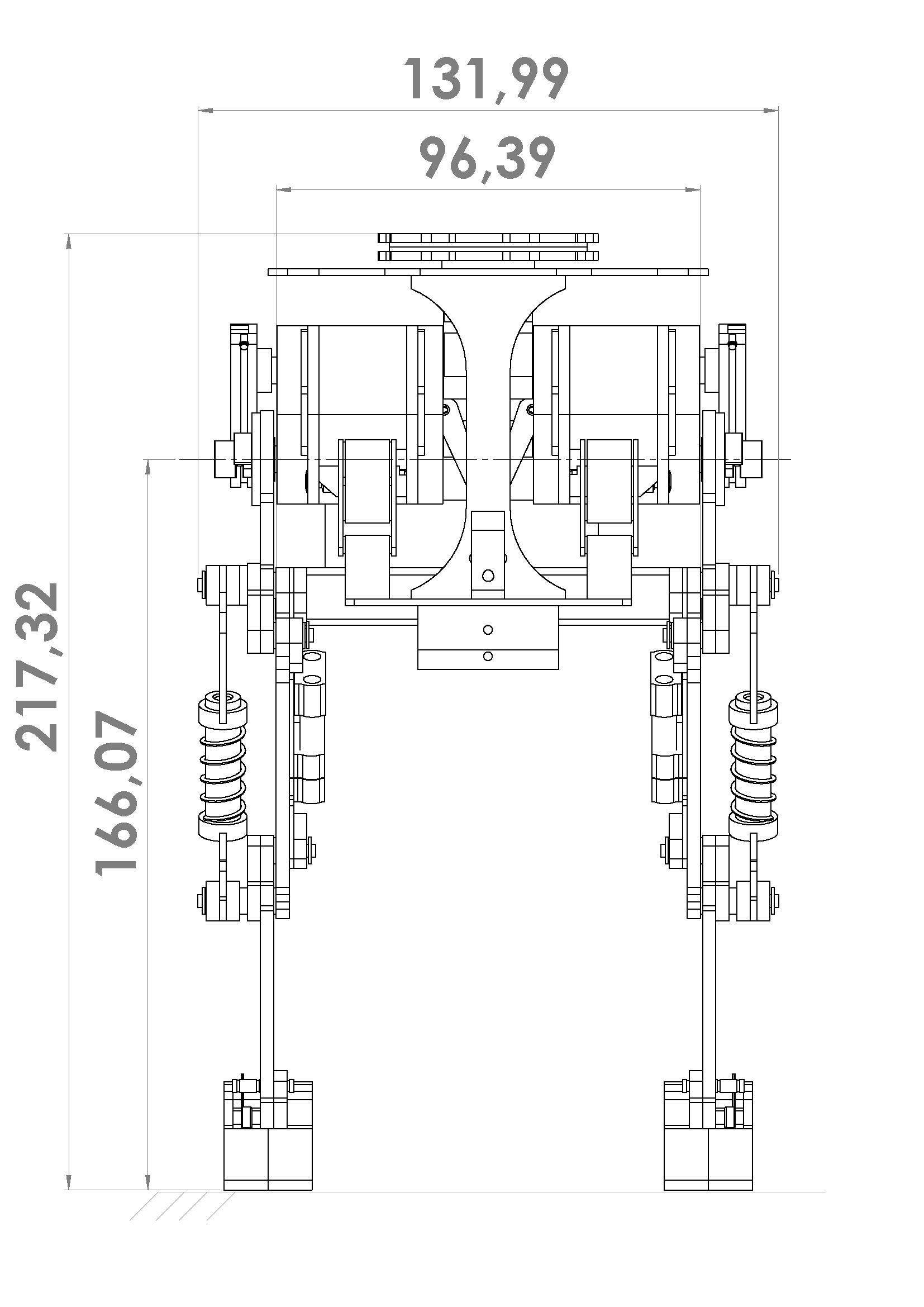
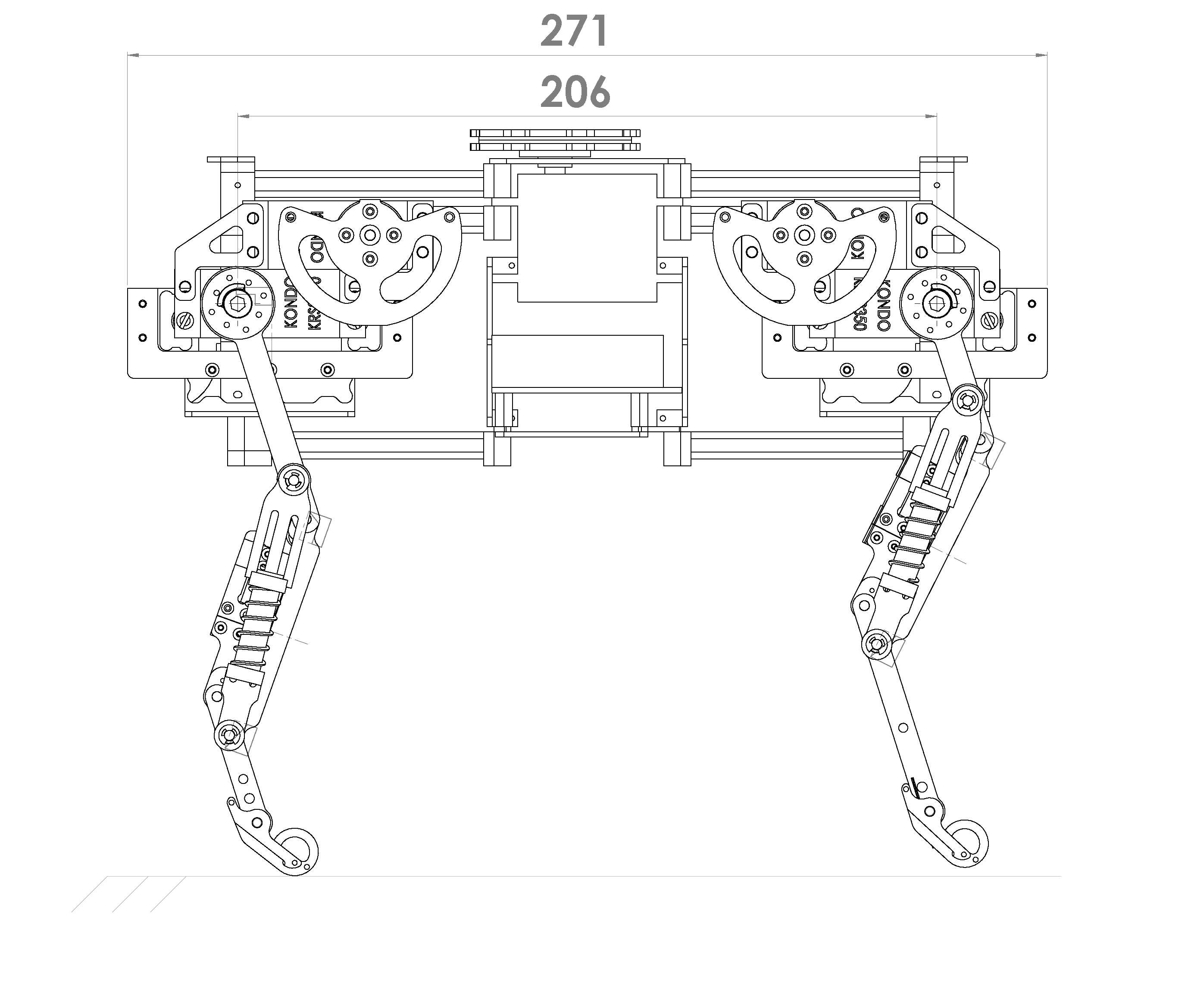
Cheetah-Cub-S is a hybrid robot that combines the pantographic leg design of Cheetah-Cub with a flexible spine. It thus gains the ability to steer. The spine can bend laterally much like a spine of lizards and is actuated by a single motor located in the middle between fore and hind trunk segments. Cheetah-Cub-S can turn with a radius of 0.5m and a speed of 0.35m/s with a non-optimized gait, taken from Cheetah-Cub. Higher turning-speeds should be achievable with the optimization of the slipping behavior. The steering is not limited to one fixed radius at the time, that was confirmed by letting the robot run a slalom with different turning radii. Additional experiments classified the payload capacity of the robot. Another comparison study with Cheetah-Cub was done in which without a spine and abduction/adduction was investigated.
Pictures
 |
  |
Videos
Related Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.Cheetah-cub-S: Steering of a Quadruped Robot using Trunk Motion
2015. 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics, Purdue University, West Lafayette, Indiana, USA, October 18-20, 2015. DOI : 10.1109/SSRR.2015.7443021.Cheetah-cub-S: Steering of a Quadruped Robot using Trunk Motion
AMAM 2015, Camebridge, Massachusetts, USA, June 21 – 25, 2015.Towards Dynamic Trot Gait Locomotion—Design, Control and Experiments with Cheetah-cub, a Compliant Quadruped Robot
International Journal of Robotics Research. 2013. Vol. 32, num. 8, p. 932-950. DOI : 10.1177/0278364913489205.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.