Crawling Humanoid Robots
The goal of this project is to study how babies learn to locomote and interact with their environment. As part of the RobotCUB project, our goal is to develop a controller for the locomotion of a humanoid robot, the iCub, that will look like a baby. For other research (e.g. in learning by imitation) at EPFL.
Concerning the iCub, see also the Laboratory of Adaptive Systems and Algorithms (LASA) headed by Prof Aude Billard (leading EPFL partner of the RobotCUB project).
People involved: Ludovic Righetti, Sarah Dégallier, Sebastian Gay, Auke Ijspeert


Design of CPG
We designed a CPG based on the theory of coupled cells network [Golubitsky and Stewart, The Symmetry Perspective, 2002], which give us a formal tool for designing systems of coupled oscillators. The design of the coupling is then made independent of the design of the dynamics of each oscillator.
During locomotion, animals have the duration of their swing phase that is always constant. Thus we designed an oscillator in which we can independently control the duration of the swing and stance phases and then reproduce this feature. With this oscillator we can then control the speed of locomotion by controlling the duration of the stance phase and have always a constant duration of the swing phase, in order to have more stable locomotion.
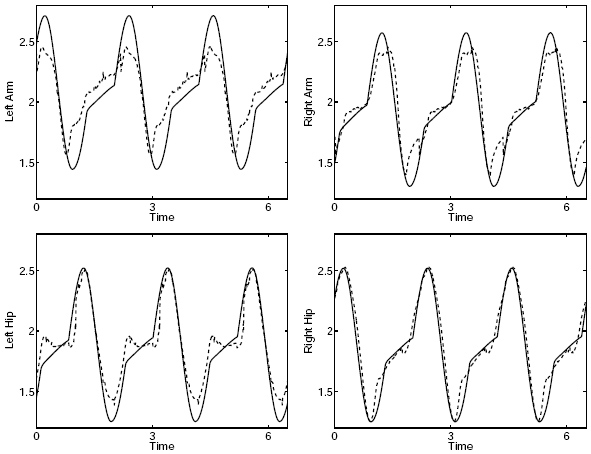
The next image is a comparison of the trajectories generated by the CPG (plain lines) and the real trajectories of the crawling baby (dashed line), we clearly see from these figures, that our controller is able to reproduce the important features we see in crawling.