Description
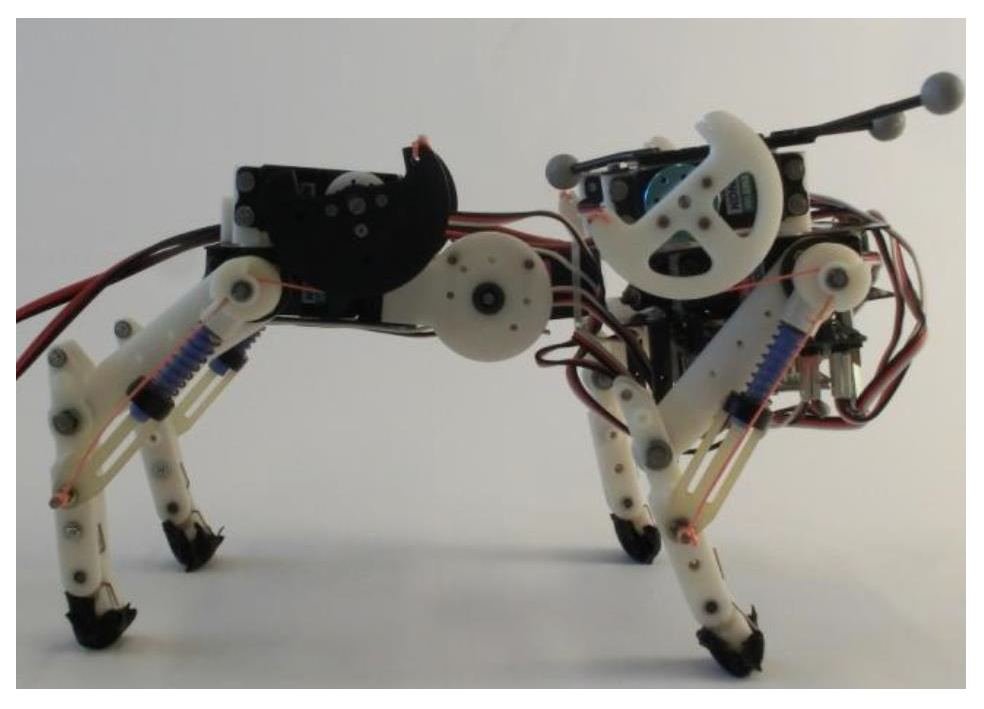
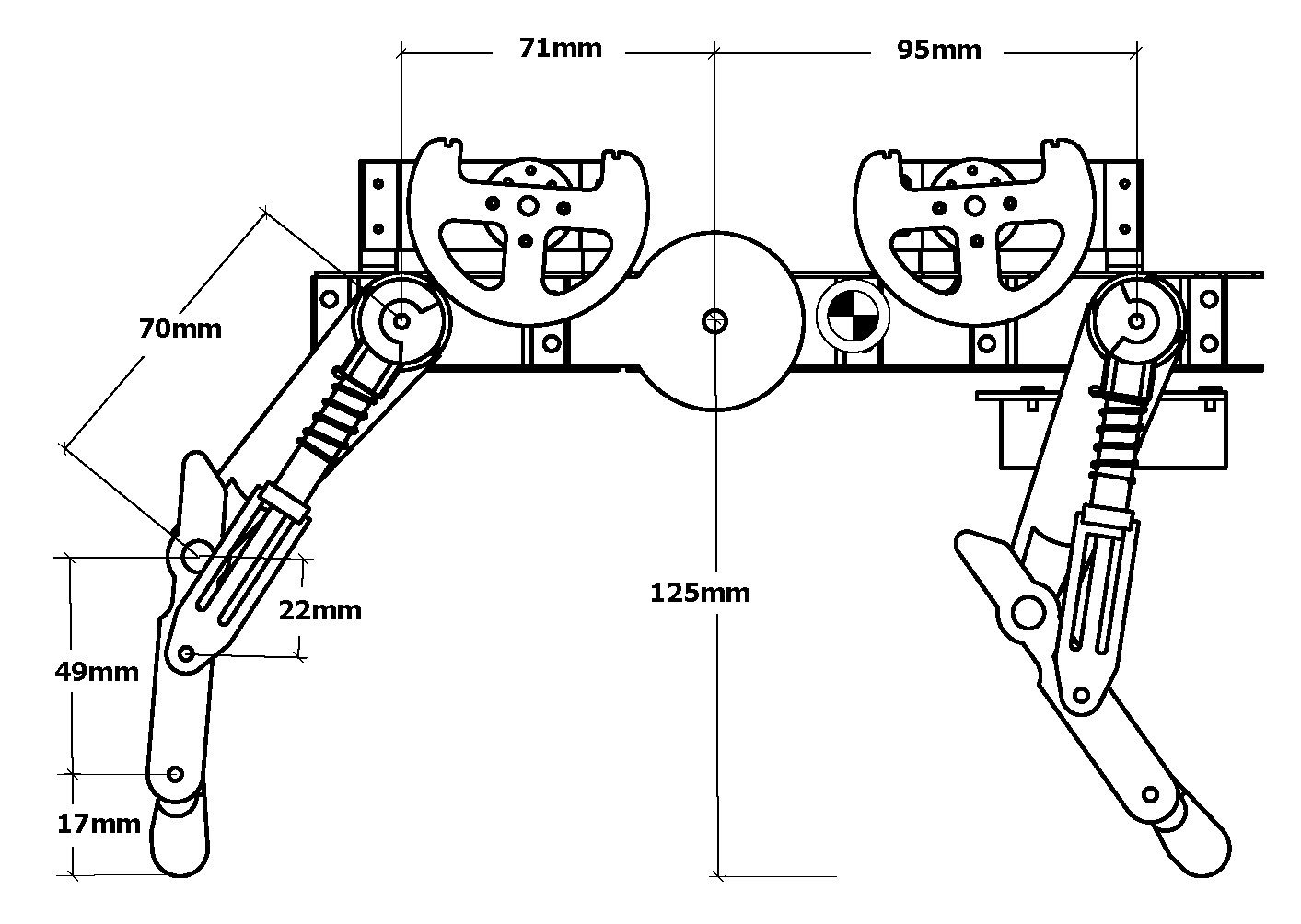
The complaint, quadrupedal robot Bobcat is a cheap and easy to produce experimental platformfor dynamic locomotion. With the actuation design based on the Cheetah-Cub, it was developed in BIOROB extending morphology research with an active and compliant spine. The leg design features a 2-segmented compliant leg with an additional springy toe. The width between fore- and hind-shoulders is different to enable overlapping feet (often seen in the fast motion of animals). The spine actuation is achieved with a single RC servomotor, positioned in between fore and hind trunk-segment. Itsmovement range is 35deg in the saggital layer. A fully connected CPG-network resembling the one implemented on Cheetah-cub is used to control the robot. An additional oscillator node expands it for the spine actuation. Electronic hardware and power-supply are the same as in Cheetah-Cub.
Pictures
 |
 |
Related publications
Robust Walking Using Peicewise Linear Spring
2014. Dynamic Walking 2014, ETH Zurich, Switzerland, June 10-13, 2014.Piecewise linear spine for speed-energy efficiency trade-off in quadruped robots
Robotics And Autonomous Systems. 2013. Vol. 61, num. 12, p. 1350-1359. DOI : 10.1016/j.robot.2013.08.001.Use Your Spine! Effect of Active Spine Movements on Horizontal Impulse and Cost of Transport in a Bounding, Quadruped Robot
2013. Dynamic Walking, Pittsburgh, USA, June, 2013.Benefits of an Active Spine Supported Bounding Locomotion With a Small Compliant Quadruped Robot
2013. 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, May 6 – 10, 2013. p. 3329-3334. DOI : 10.1109/ICRA.2013.6631041.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.