We are glad to announce this work featured in:
Karakasiliotis K, Thandiackal R,
Melo K, Horvat T, Mahabadi NK, Tsitkov S,
Cabelguen JM, Ijspeert AJ. 2016 From
cineradiography to biorobots: an approach for
designing robots to emulate and study animal
locomotion. J. R. Soc. Interface 20151089.
DOI: 10.1098/rsif.2015.1089
Electronic supplementary material is available
at http://dx.doi.org/10.1098/rsif.2015.1089 or
via http://rsif.royalsocietypublishing.org.
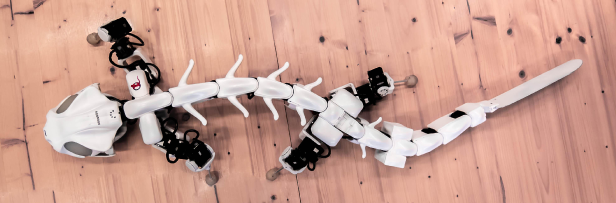
We present the new salamander-like robot Pleurobot. Contrary to our previous bio-inspired approaches, in this new approach we make use of the recent advances in cineradiography to benefit from the advantages that a biomimetic design can offer. We recorded three-dimensional X-ray videos of salamanders, Pleurodeles waltl, walking on ground, walking underwater and swimming. Tracking up to 64 points on the animal’s skeleton we were able to record three-dimensional movements of bones in great detail. Using optimization on all the recorded postures for the three gaits we deduced the number and position of active and passive joints needed for the robot to reproduce the animal movements in reasonable accuracy in three-dimensions.
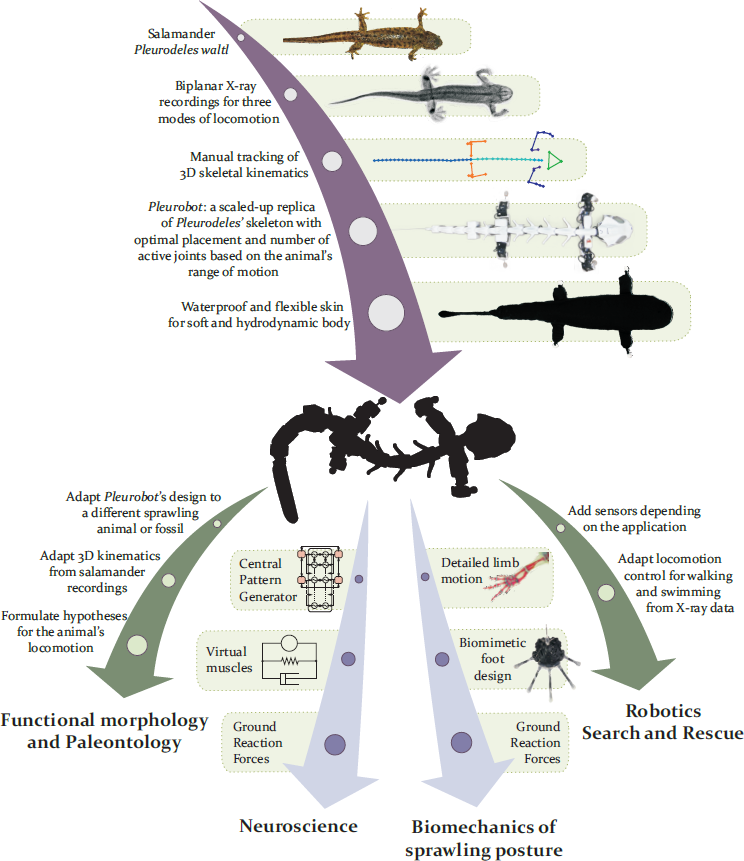
Our aim is to demonstrate how Pleurobot’s design methodology, along with recent methods for robotic production, may yield fast and cost effective platforms able to become a physical interface for: i) neuroscientists, ii) biomechanists, functional morphologists and paleontologists and iii) roboticists.
The following figure explains Pleurobot’s design methodology as well as the related applications. Our main goal is to further understand the way that the nervous system coordinates movement in vertebrates. Pleurobot’s design, with 27 degrees of freedom, allows us to test more advanced mathematical models of the locomotor nervous system towards richer motor skills. Apart from neuroscience, Pleurobot finds interesting applications in robotics for search and rescue as well as paleontology. Because of its low center of mass and segmented legs it can navigate over rough terrain without loosing balance. With a waterproof skin it can also swim. Those features may one day enable Pleurobot to help in search and rescue operations. On the other hand, salamanders are a good living analog for the first tetrapods that made the transition from water to land. In the future, we plan to use Pleurobot’s design methodology to bring early tetrapods to ‘life’.
This research received funding from the National Center of Competence in Research (NCCR) in Robotics and from the Swiss National Science Foundation (project CR23I2_140714).
Media Appearances:
Auke Ijspeert TED talk: https://www.youtube.com/watch?v=K926HAKRFvw
Tested, San Francisco Bay Area Science Festival: https://www.youtube.com/watch?v=zcAR_2bNojE
Pictures of the robot:

Credits: Konstantinos Karakasiliotis & Robin Thandiackal, BioRob, EPFL, 2013
Pleurobot at the NCCR site visit demo, Lausanne:

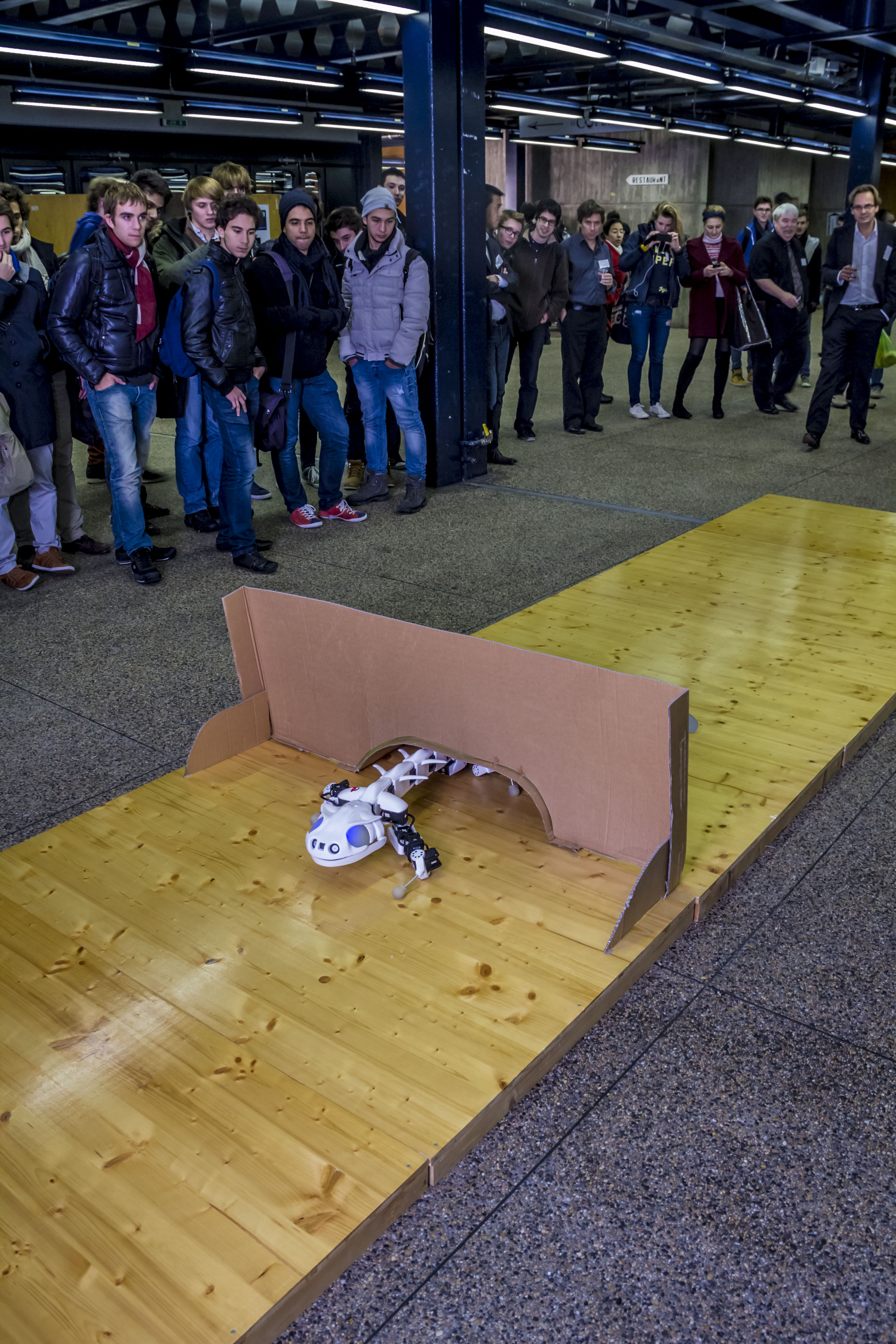


Credits: Konstantinos Karakasiliotis, BioRob, EPFL, 2013