Superimposition of discrete and rhythmic movements
Our goal is to develop an architecture that allows for the generation of complex movements, seen as superimpositions of discrete (goal-directed) and rhythmic movements. Our architecture is built on the hypothesis that complex movements can be generated through the superimposition and sequencing of simpler motor primitives. This work is part of the RobotCUB project.
Analogously to what has been observed in humans, we have developed a three-layer architecture, defined functionally as follows:
(a) the planner (i.e the motor cortex in humans) builds the mental representation of the task;
(b) the manager (the brain stem, the basal ganglia and the cerebellum) is involved in the selection, timing and coordination of the appropriate behaviors;
(c) the generator (the spinal cord) generates trajectories through central pattern generators (CPGs), that we see as networks of neurons involved in the production of movement primitives.
Note that as our particular interest is movement generation here, we do not focus on the high cognitive abilities needed to define and choose the action; in terms of the architecture, we do not focus on the implementation of the planner.
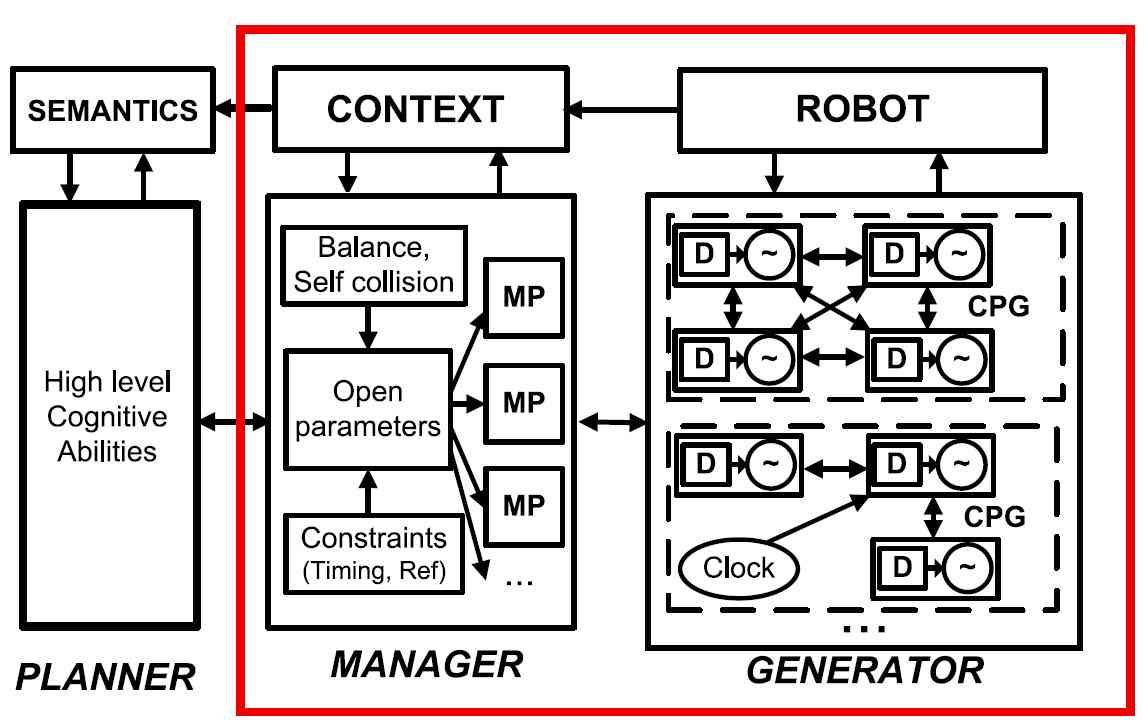

The manager is responsible for launching motor programs (MPs) according to the information received from the planner (voluntary movements) and to sensory information (automatisms) subject to constraints such as balance and timing. MPs consists in sets of time-varying parameters that are sent to the generator; such parameters consist of the couplings between the dofs, i.e. the topology of CPGs (two examples are shown on the figure), the target position for discrete movements and the amplitude and frequency for rhythmic movements.
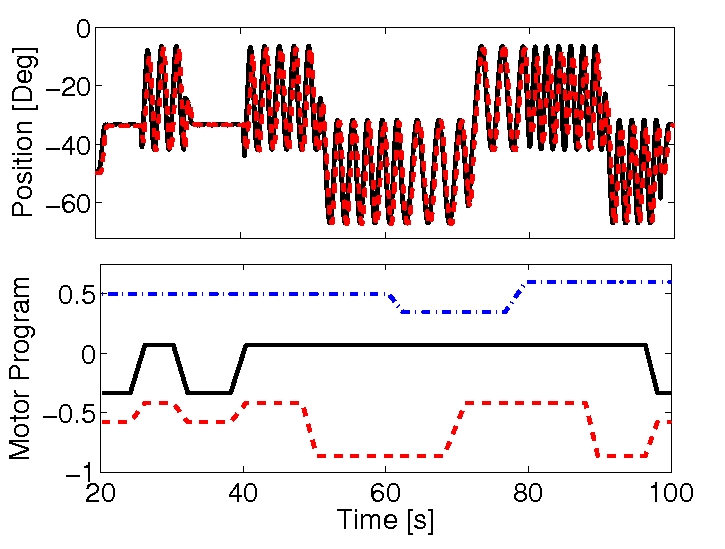
Thanks to the motor primitives, different type of relatively complex outputs (rhythmic, discrete or rhythmic and discrete) can be achieved through the specification of very simple input commands. For an application of the system to drumming please visit this page.
People involved
Sarah Dégallier, Auke Ijspeert
Related Publications
S. Degallier, L. Righetti, L. Natale, F. Nori, G. Metta and A. Ijspeert, A modular bio-inspired architecture for movement generation for the infant-like robot iCub , in Proceedings of the second IEEE RAS / EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2008. [PDF]
S. Degallier, C. P. Santos, L. Righetti and A. Ijspeert, Movement generation using dynamical systems: a humanoid robot performing a drumming task , in Proceedings of the IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS06), 2006. [Video] [PDF]