Modular robotics for adaptive and self-organizing furniture
Article in Robotics and Autonomous Systems (May 2020):
Roombots extended: Challenges in the next generation of self-reconfigurable modular robots and their application in adaptive and assistive furniture (DOI: 10.1016/j.robot.2020.103467, preprint)
In this article, we show improvements of the Roombots hardware as well as a series of proof-of-concept experiments demonstrating how the Roombots modules could be used as assistive and self-assembling furniture. In particular, we demonstrate autonomously moving furniture, self-reconfiguration with 12 modules (36 degrees of freedom in total), object manipulation and gripping capabilities, human-module-interaction and the development of an easy-to-use user interface.
See the video below, and a nice article in IEEE Spectrum.
Previous paper
A Hardware Perspective on 3D Self-Reconfiguration and Locomotion with a Homogeneous Modular Robot, accepted in Robotics and Autonomous Systems, July 2014, Online here: http://www.sciencedirect.com/science/article/pii/S0921889013001632
See the released Roombots EPFL Youtube video.
This project funded by the Swiss NCCR in Robotics explores the design and control of modular robots, called Roombots, to be used as building blocks for furniture that moves, self-assembles, and self-reconfigures. Modular robots are robots made of multiple simple robotic modules that can attach and detach (Wikipedia: Self-Reconfiguring Modular Robotics). Connectors between units allow the creation of arbitrary and changing structures depending on the task to be solved. Compared to “monolithic” robots, modular robots offer higher versatility and robustness against failure, as well as the possibility of self-reconfiguration. The type of scenario that we envision is a group of Roombots that autonomously connect to each other to form different types of furniture, e.g. stools, chairs, sofas and tables, depending on user requirements. This furniture will change shape over time (e.g. a stool becoming a chair, a set of chairs becoming a sofa) as well as move using actuated joints to different locations depending on the users needs. When not needed, the group of modules can create a static structure such as a wall or a box. Our dream is to provide multi-functional modules that are merged with the furniture and that lay users and engineers can combine for multiple applications.
The type of applications of such robots could be multiple: assistive furniture for the elderly or for people with a motor handicap, programmable conference rooms, interactive art, satelite or space station elements, etc. We are particularly interested in the first application, namely providing assistance to the elderly. Thanks to a SNF grant starting in September 2014, we would like to design multifunctional and assistive robotic furniture that can interact with users, help them recover from a fall, monitor their health, help them transfer between different positions (laying/sitting/standing), help them manipulate objects, and move away from or closer to the user depending on his/her needs.This work will be done in collaboration with the CHILI lab and with DomoSafety.
Our article in Robotics and Autonomous Systems (July 2014) presents an important milestone in the project. In particular we were able to demonstrate the following important basic functionalities of the Roombots:
- off-grid locomotion, i.e. free locomotion in the room
- going from off-grid to on-grid
- on-grid locomotion, i.e. moving on a grid of connectors thanks to sequences of attachments and detachments
- on-grid locomotion with collaboration between modules (e.g. one module helping the other to go over a corner)
- (simple) object manipulation for constructing pieces of furniture.
See movies and pictures below.
Pictures
Copyright of pictures and videos: see the end of this page. Click the pictures to view a larger version.
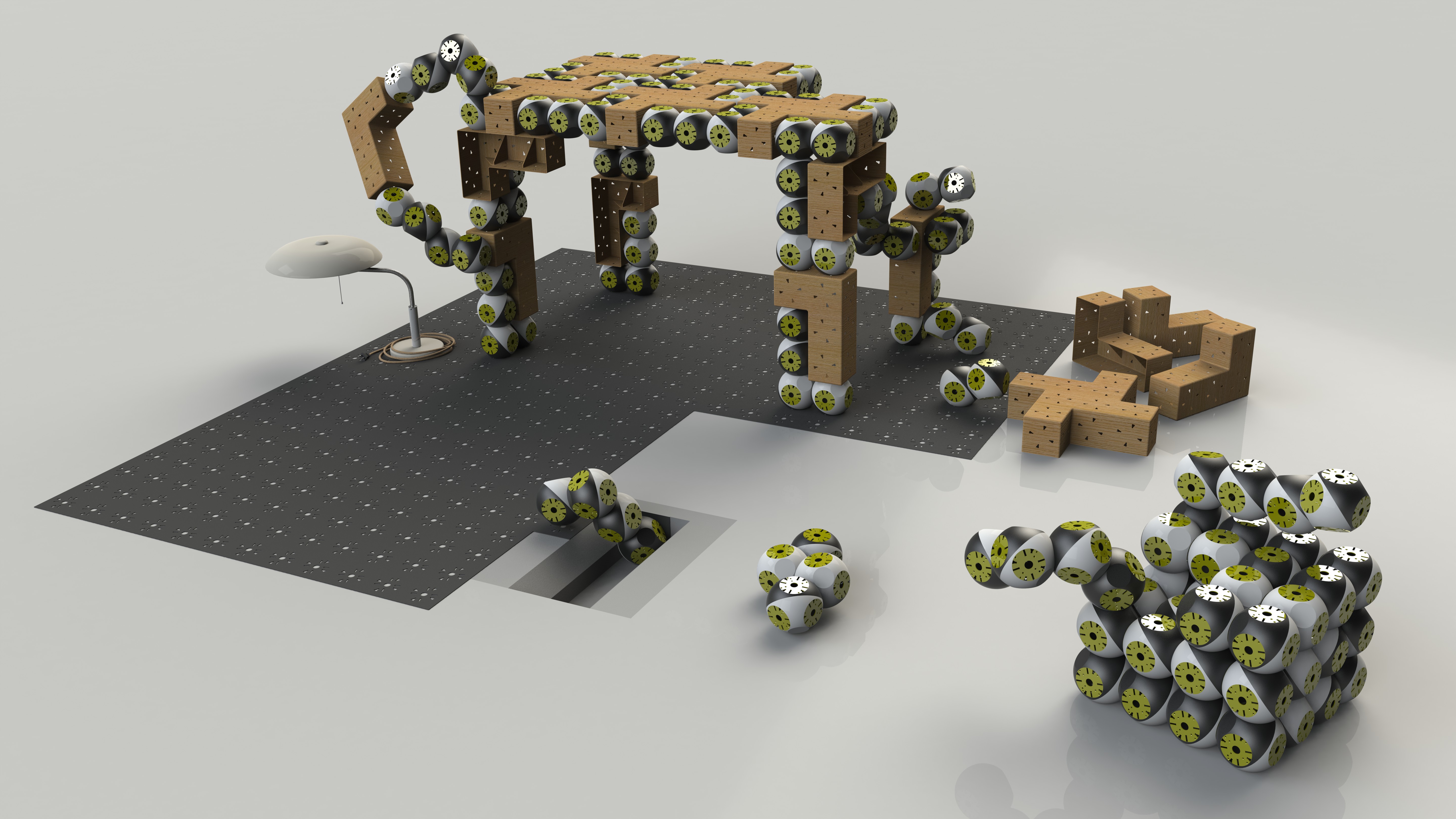 |
| Rendered vision of a table being assembled by Roombots (RB) modules, using lightweight elements and integrated RB modules. |
 |
 |
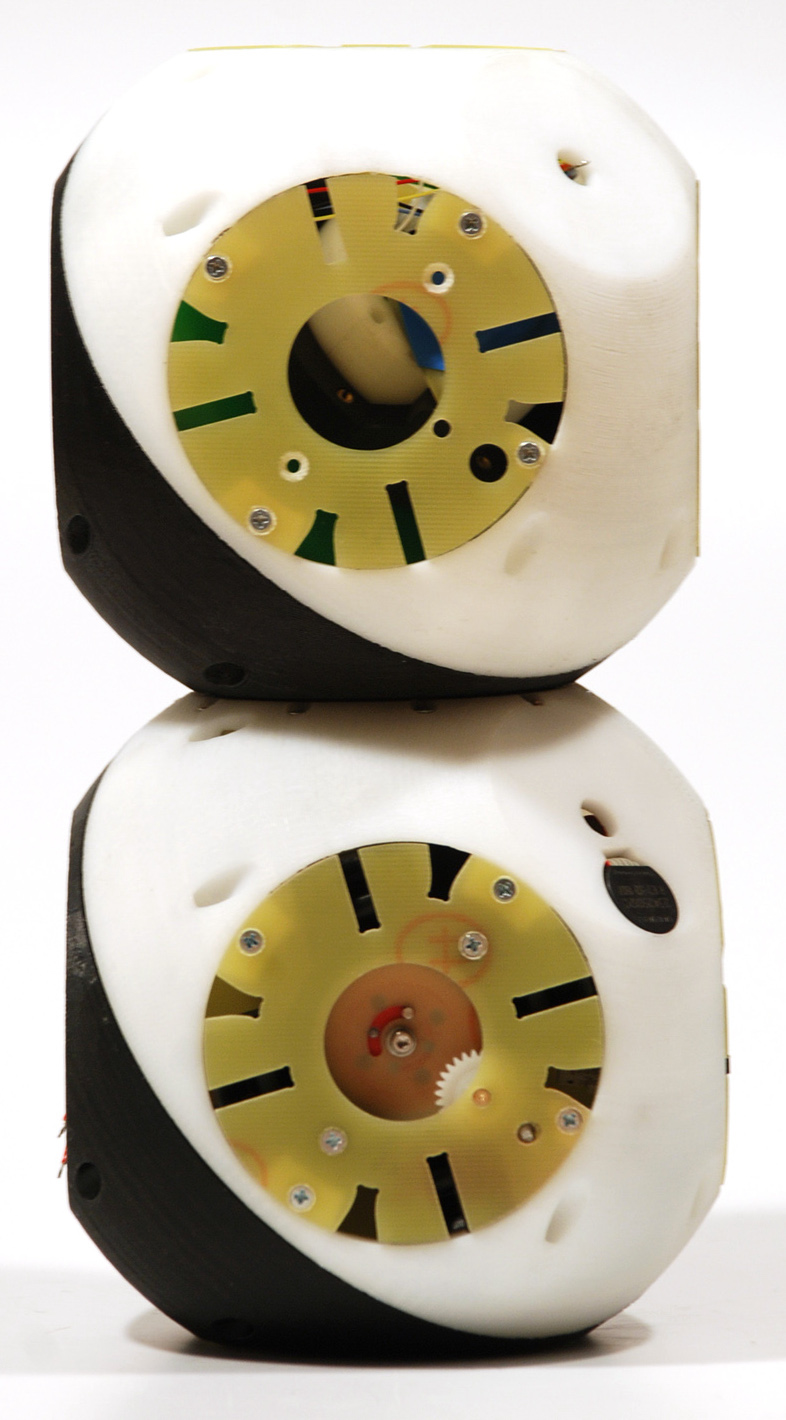
| Left: a Roombots module. The lower frontal connector is a fully equipped, active connection mechanism. The upper frontal slot is equipped with a passive connector plate. Right: rendered exploded view of a Roombots module. | |
 |
 |
 |
|
| Top-left: Roombots modules coming out of a storage box. Bottom-left and right: illustration of plug and play capabilities of Roombots modules. | |
 |
|
| A snake-like structure made of Roombots modules. | |
 |
 |
 |
 |
 |
 |
| Concepts of application scenarios: (top) assistive apartment, (middle) Kindergarten, and (bottom) terrace. Images created by Augustin Mercier. | |
 |
 |
 |
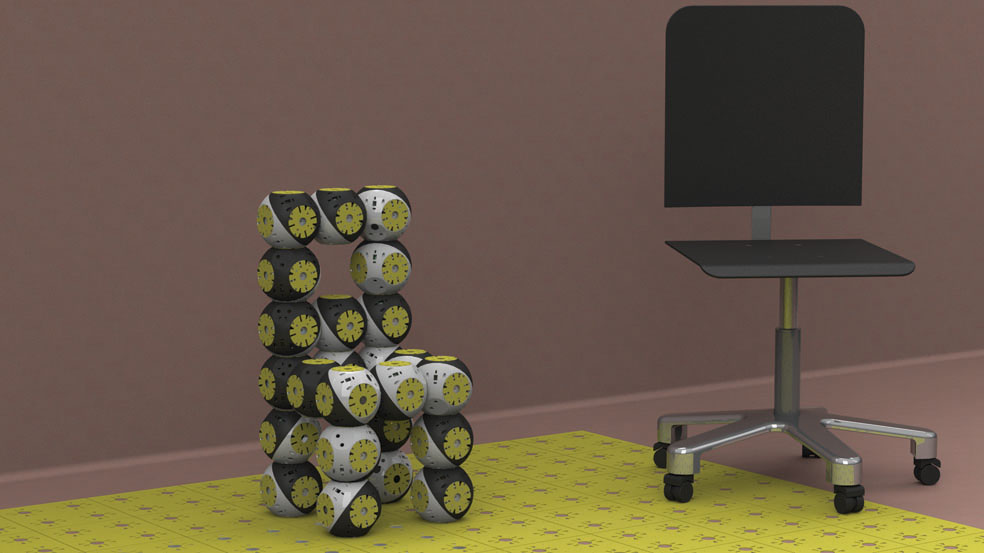
| Chair from 12 RB modules. Typical office chair for size comparison included. | Table from RB modules and L-shaped passive pieces. | RB stool from 8 RB modules. |
 |
 |
 |
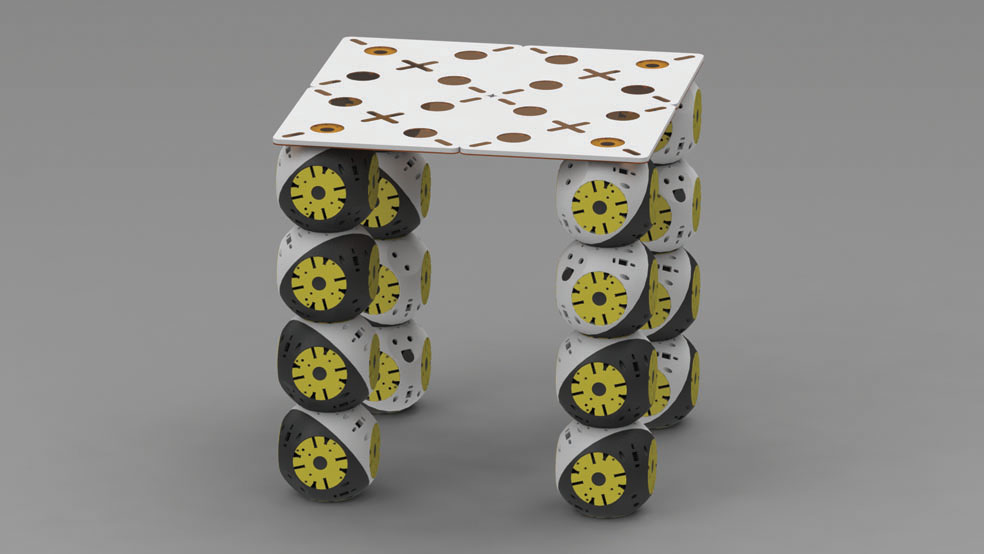
| Miniature-table from 8 RB modules and 4 plates. | Coffee table from 8 RB modules and passive pieces. | Stool from 12 RB modules and passive pieces. |
| Rendered examples of furniture pieces made of either Roombots modules only, or mix of Roombots modules and passive elements. These passive elements are used to enhance structural integrity, and decrease complexity and weight. The black office chair, the stool, and the lamp are included for size comparison. | ||
Movies
Selected movies of Roombots hardware
| The Flash Player doesn’t seem to be installed on your computer. Please download and install it if you want to see the movie without downloading it. |
| Overview of the Roombots project |
Selected movies of Roombots optimization
Selected movies of Roombots reconfiguration
Collaborations
Experimental design studio
Design studio led by Laurent Massaloux and Simon Henin from Ensci Les ateliers (École nationale supérieure de création industrielle) in collaboration with EPFL+ECAL lab.
The studio aims to develop application scenarios using Roombots, in which the robots interact with existing objects and humans. An important part of the study was linked to creating passive accessories that could be manipulated by Roombots.
The results of this study were presented at Futur en Seine in June 2013.
Roombots Gardener from Anthony Loeuk on Vimeo.
Kyrielle [ENSCI] from Matthieu Ruthy on Vimeo.
Research overview
| Specifications of a single Roombots module | |
| Overall dimensions | 110x110x220 mm (4.3″x4.3″x8.7″) |
| Weight | 1.4 kg (3.1 lb) |
| Degrees of freedom | 3 (continuous rotational) |
| Number of connection ports | 10 (active or passive) |
| Active connection type | 4-way symmetrical gender-less mechanical latches |
| Energy source | 4-cell LiPo battery, 1200 mAh. Autonomy ~1 hour |
| Communication | Bluetooth |
| Outer motors | Faulhaber 2342 012 CR |
| Inner motor | Faulhaber 2232 012 SR |
| Outer gearboxes reduction | 305:1 (custom made) |
| Inner gearbox reduction | 366:1 (custom made) |
| Outer dofs specs | 26.6 RPM (no load), 4.9 Nm (nominal) |
| Inner dof specs | 19.4 RPM (no load), 3.6 Nm (nominal) |
Development of the hardware modules
The first objective of this project is to develop modular robot prototypes of Roombots suitable for the scenarios described above. Each module has its own actuated joints, controller, and battery. Mechanical connectors allow rapid and solid attachment and detachment mechanisms between modules. Different types of sensing and communication abilities are being explored.
Control of locomotion of multi-unit Roombots
The second objective of the project is to develop novel methods for the adaptive control of movement and locomotion of multi-unit Roombots structures. The controllers should be capable of learning efficient types of locomotion for robot structures that are unknown a-priori and that change over time. We are exploring the use of distributed coupled nonlinear oscillators combined with optimization algorithms. The challenge is to find local interaction rules that optimize the global behavior of the group of modules, and that are sufficiently rapid to be carried out online.
Control of self-reconfiguration
The third objective is to design self-configuration algorithms for the generation of particular multimodule structures (e.g. stools or chairs), and to transform a structure A into a structure B. A transformation is performed through a sequence of motor actions, as well as attachments and detachments. We are currently developing planning algorithms that use metrics to measure the distance between structures, as well as heuristics to search for sequences of actions to reach a specific desired structure.
Robot-user interface
The fourth objective is to design a user-robot interface to allow users to guide, control and teach a group of modules. We aim at interactions that are high-level and easily learnable by non-expert users (i.e. general guidance rather than programming), using state-of-the-art mobile interfaces, tactile interactions with the modules, as well as a web interface. We are currently exploring a solution that combines gesture recognition using Kinects and augmented reality on iPads.
Involved People
This project is jointly done between CHILI lab and BioRob.
Past members: Stephane Bonardi, Massimo Vespignani, Rico Moeckel, Alex Sproewitz, Soha Pouya, and Masoud Asadpour.
Active and past collaborations: DomoSafety, EPFL+ECAL lab, ENSCI – Les Ateliers, Equimodus, and LASA
Funding
This project was funded by the Locomorph project and by the Swiss NCCR in robotics. Preliminary studied were funded by Microsoft Research Cambridge and EPFL.
Roombots student projects and Master theses
- Collaborative locomotion in self-reconfigurable modular robots (SRMR), Hala Khodr (Master (diploma) project, 2018-2019)
- CPG and Tegotae-based Locomotion Control of Quadrupedal Modular Robots, Rui Vasconcelos (Master (diploma) project, 2016-2017)
- Hardware Integration of a Universal Gripper to the Roombot Module, Théo-Tim Denisart (Semester project, 2016-2017)
- Passing objects: robot-robot interaction with universal grippers, Quentin Golay (Semester project, 2016-2017)
- Young's modulus variation of a variable stiffness element based on jamming of compliant granules, Frédéric Freundler (Semester project, 2016-2017)
- Active connection mechanism for space exploration on Mars with modular robots , William Ponsot (Semester project, 2015-2016)
- Autonomous vision based docking of roombots, Adan Häfliger (Semester project, 2015-2016)
- Effect of compliance in modular robots structures on locomotion, Adi Vardi (Semester project, 2015-2016)
- From Play-Doh to Roombots, Radosław Patryk Dryzner (Semester project, 2015-2016)
- Immersive Interaction Framework for Self-reconfigurable Modular Robots, Valentin Zenon Nigolian (Semester project, 2015-2016)
- Multi-sensory autonomous docking approach for a self-reconfigurable robot without mechanical guidance, Stéphane Bussier (Master (diploma) project, 2015-2016)
- Universal Gripper Controller Design with Visual Feedback, Ahmet Safa Öztürk (Semester project, 2015-2016)
- Hybrid Brain Computer Interface to Control Modular Robots, Michaël Moret (Semester project, 2014-2015)
- Intelligent User Interface for Roombots, Ayberk Özgur (Semester project, 2013-2014)
- Mobile control interface for modular robots, Luc Girod (Semester project, 2013-2014)
- Optimization of the locomotion of YAMOR structures, Nicolas Comte (Semester project, 2013-2014)
- Hybrid optimization with Roombots, Emmanuel Senft (Master (diploma) project, 2012-2013)
- Intelligent User Interface for Roombots, David Maksa (Semester project, 2012-2013)
- Optimizing modular robots locomotion in simulation and applying results to the real-world robot, Yura Perov (Internship, 2012-2013)
- Mobile control interface for modular robots, Jérémy Blatter (Master (diploma) project, 2011-2012)
- Online Optimization for the locomotion of Roombots, The Anh Nguyen (Semester project, 2011-2012)
- Online optimization for the locomotion of Roombots structures, Frédéric Wilhelm (Semester project, 2011-2012)
- Reconfiguration algorithm for adaptive furniture, Manuel Stöckli (Master (diploma) project, 2011-2012)
- Automatic labeling for roombots tracking data, Etkin Özgül (Internship, 2010-2011)
- Design and integration of a multi-axis force sensor for the Roombots, Joël Rey (Semester project, 2010-2011)
- Elasticity compensation using explicit learning, Émilie Badri (Master (diploma) project, 2010-2011)
- Firmware Development for Roombots, Xinkui Feng (Internship, 2010-2011)
- Grid Alignment and extendable grid for Roombots, Than-Khai Dinh (Semester project, 2010-2011)
- Mobile control interface for modular robots, Gilles Cressier (Semester project, 2010-2011)
- Online adaptation of locomotion control to changes of body structure, Michka Mélo (Semester project, 2010-2011)
- Co-evolution for Roombots, Ebru Aydin (Master (diploma) project, 2009-2010)
- Distributed Roombot Locomotion and Self-Reconfiguration, Philippe Laprade (Master (diploma) project, 2009-2010)
- Roombots Reconfiguration Inverse Kinematics and Cooperative Movement Tasks, Manon Picard (Semester project, 2009-2010)
- Roombot modules - Kinematics Considerations for Moving Optimizations, Mikaël Mayer (Semester project, 2008-2009)
- Roombots - Central Pattern Generators, Symmetries and online learning, Alexandre Tuleu (Semester project, 2008-2009)
- Self-reconfiguration for Adaptive Furniture, Jocelyne Lotfi (Master (diploma) project, 2008-2009)
- Locomotion in Modular Robotics - Roombot Module, Sandra Wieser (Semester project, 2007-2008)
- Locomotion in Modular Robots: YaMoR Host 3 and Roombots, Simon Lépine (Semester project, 2007-2008)
- Study of the new Roombots modules, Simon Blanchoud (Semester project, 2006-2007)
- Toward Emancipation of Furniture. A Kinematics-Dependent Reconfiguration Algorithm for Chain-Type Modular Robots, Sébastian Gay (Master (diploma) project, 2006-2007)
- Design and simulation of locomotion of self-organising modular robots for adaptive furniture, Rafael Arco Arredondo (Master (diploma) project, 2005-2006)
If you are interested in a semester or master student project at Biorob, please contact us! We are always interested in hearing from motivated students. A comprehensive list of past student projects can be found here, a list of open projects can be found here. We are also open for suggestions.
Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows: Biorobotics Laboratory, EPFL. Please contact us by email if you would like additional information or higher resolution videos.