Envirobot Project
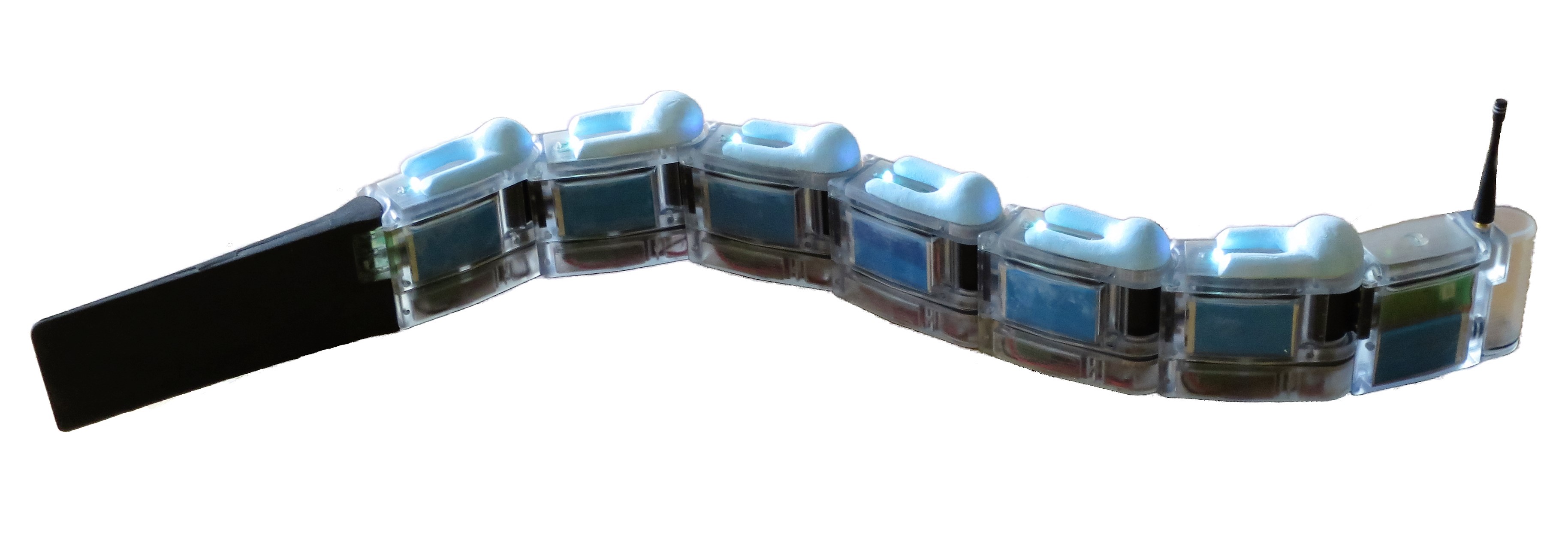 The Envirobot project is funded as part of the swiss Nano-Tera program. In the context of this project we are improving the anguiliform swimming robot (fourth generation of Amphibot) and equipping it with multiple sensors for pollution detection in lakes. Some of the aims of the project are to design and construct an aquatic water sampling and water analysis robot, which can either work in a surveying mode according to a predefined path, or in autonavigation mode, according to chemosensory and biological systems input; and that can store and/or communicate data analysis to an external observer.
The Envirobot project is funded as part of the swiss Nano-Tera program. In the context of this project we are improving the anguiliform swimming robot (fourth generation of Amphibot) and equipping it with multiple sensors for pollution detection in lakes. Some of the aims of the project are to design and construct an aquatic water sampling and water analysis robot, which can either work in a surveying mode according to a predefined path, or in autonavigation mode, according to chemosensory and biological systems input; and that can store and/or communicate data analysis to an external observer.
People involved: Behzad Bayat, Alessandro Crespi, André Guignard, Auke Ijspeert