We are glad to announce this work featured in:
John A. Nyakatura, Kamilo Melo, Tomislav Horvat, Kostas Karakasiliotis, Vivian R. Allen, Amir Andikfar, Emanuel Andrada, Patrick Arnold, Jonas Lauströer, John R. Hutchinson, Martin S. Fischer and Auke J. Ijspeert. Reverse-engineering the locomotion of a stem amniote. Nature 565, 351–355; 2019. DOI: 10.1038/s41586-018-0851-2
Electronic supplementary material is available at https://doi.org/10.1038/s41586-018-0851-2
or via https://www.nature.com/articles/s41586-018-0851-2
Using the fossil and fossilized footprints of a 300-million-year-old animal, we, at the Biorobotics laboratory at EPFL together with an interdisciplinary team at Humboldt-Universität zu Berlin, have developed a methodology for identifying the most likely gaits of extinct animals and a robot that can recreate the extinct animal’s walk. This innovative study of animal biomechanics using robots can help researchers better understand the evolution of locomotion of vertebrates.

To understand Orobates’ walk and pinpoint how advanced its locomotion was, we developed a digital model of its skeleton based on the animal’s fossil and the biomechanics of modern animals that adopt sprawling postures. We used this model to carry out the first “kinematic” computer simulation of Orobates gaits – that is, a simulation that focusses on its motions (rather than forces) and identified gaits in which the bones did not collide or dismember from their joints as the simulated Orobates walked over the digitalized footprints.
In parallel, we used the fossilized animal’s anatomy to inform the construction of a robot called OroBOT. This robot, designed and scaled to match the shape and motions of the extinct animal, was used to calculate the physics of walking in Orobates. Our robotic model allowed us to test our hypotheses about the animal’s locomotion dynamics (Forces, balance, gravity influence, friction, etc).
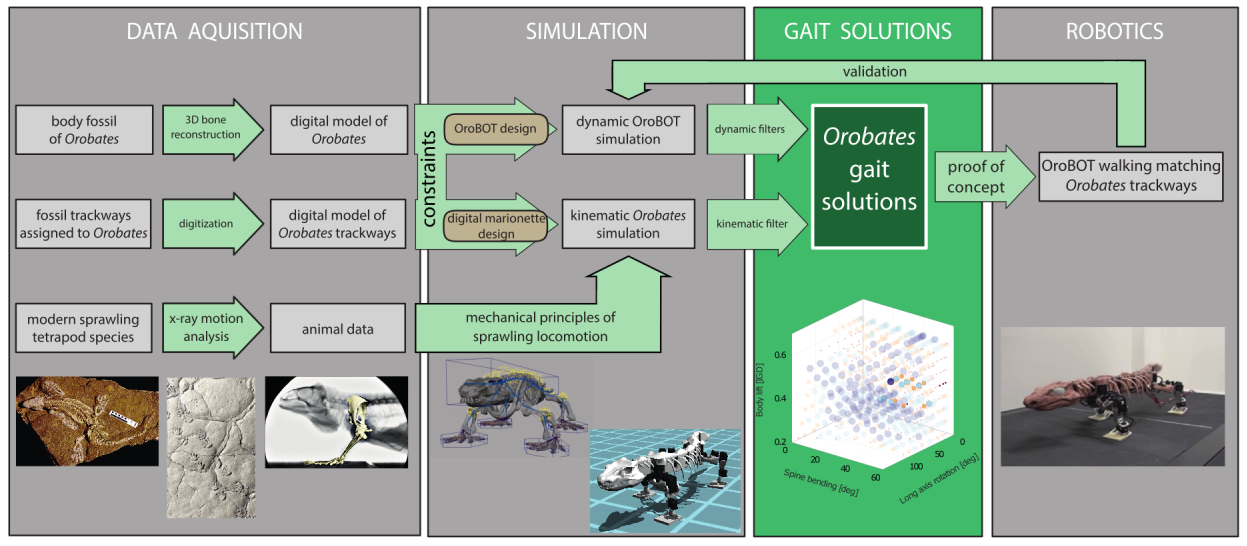
We tested hundreds of different gaits with our robot (both in simulation and with the physical platform), in order to determine which ones Orobates most probably used, or did not use. The tested gaits were based on biomechanical principles extracted from similar modern-day animals such as caimans, salamanders, iguanas and skinks, which we analyzed using X-ray videos and force measurements. This allowed us to study the biomechanics of their movements and determine which mechanical principles they all followed. We looked at three features in particular:
- How erect the animal stood on its legs
- How much its backbone bended laterally
- And how much its elbow or its shoulder joints bended as it walked.
Using the results, we came up with the most probable ways in which Orobates walked. We scored the gaits based on the following metrics:
- How much energy was required
- How stable the movements were
- How the leg forces compared with those of other sprawling animals
- How closely the movements aligned with the fossilized footprints
The resulting gaits with good scores appeared quite athletic, most closely resembling the movements of the caiman, indicating that most likely Orobates already held itself quite upright on its legs; unlike a salamander or skink, and thus exhibited more advanced locomotion than suspected.
The study concluded that more advanced locomotion, as in Orobates, may have evolved before the common ancestor of reptiles and mammals.
Interactive Website:
Results of this work can be explored in the interactive website: https://go.epfl.ch/orobates
Interactive Simulator:
Play with the Webots Online Simulator of OroBOT:
https://cyberbotics2.cyberbotics.com/orobot/simulation.php
F.A.Q.
Please download the frequent asked questions file here
Media Kit:
A media kit was prepared and can be found here. It contains figures and videos of Orobates and OroBOT (with credits information) as well as a press release and F.A.Q.
