Description
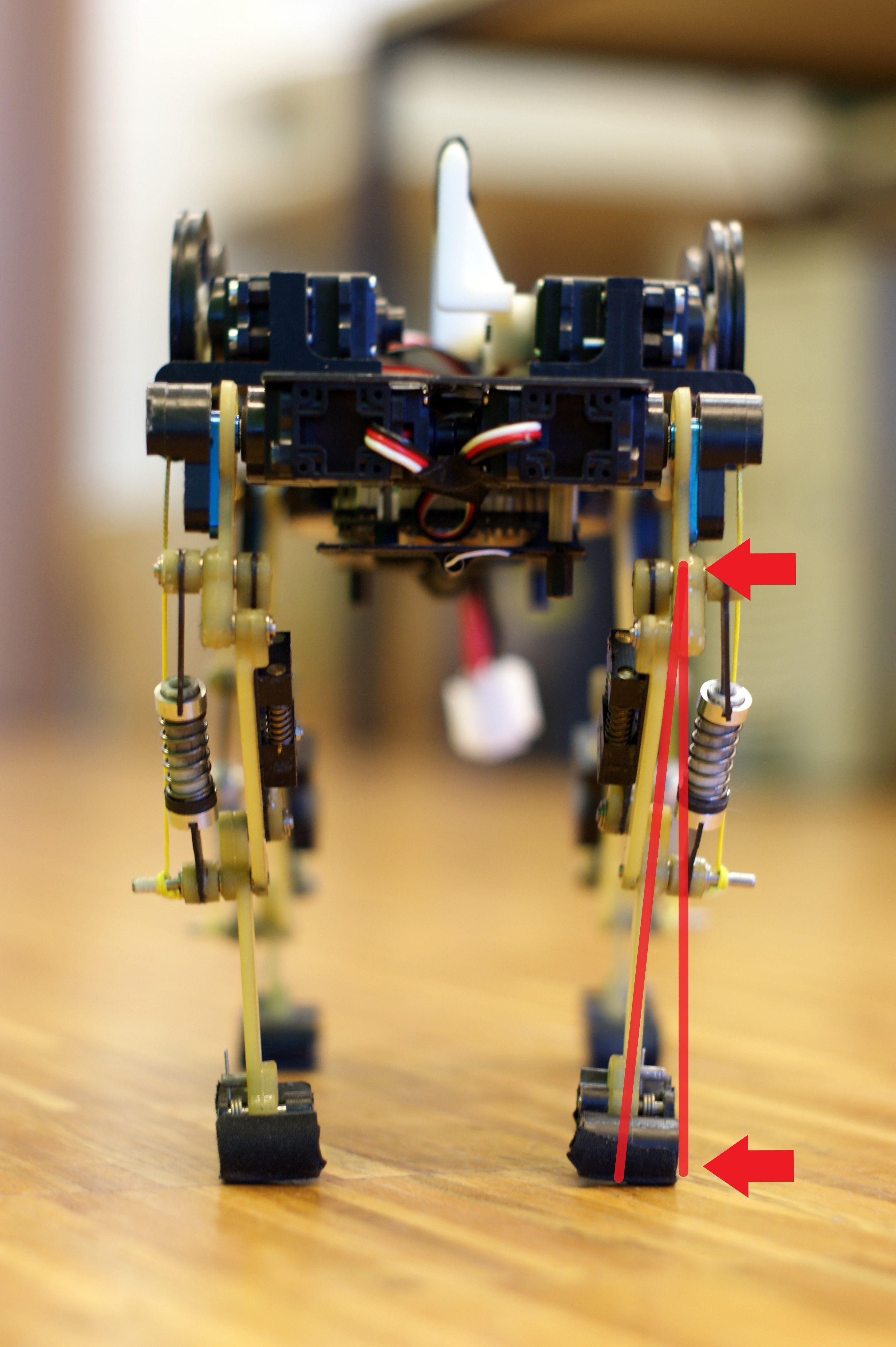
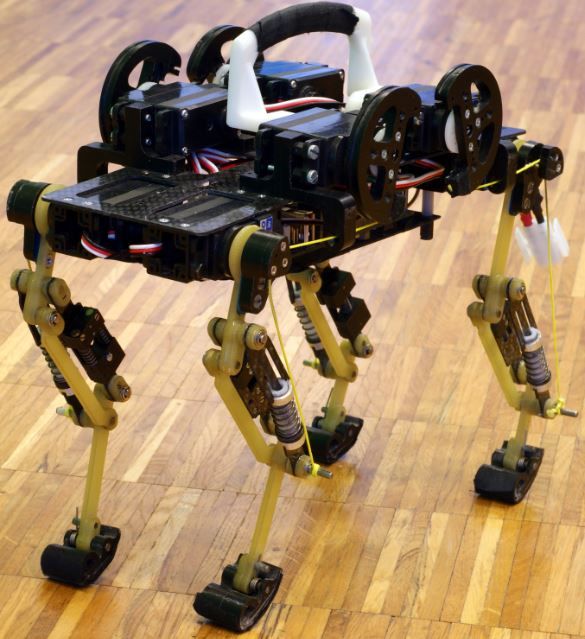
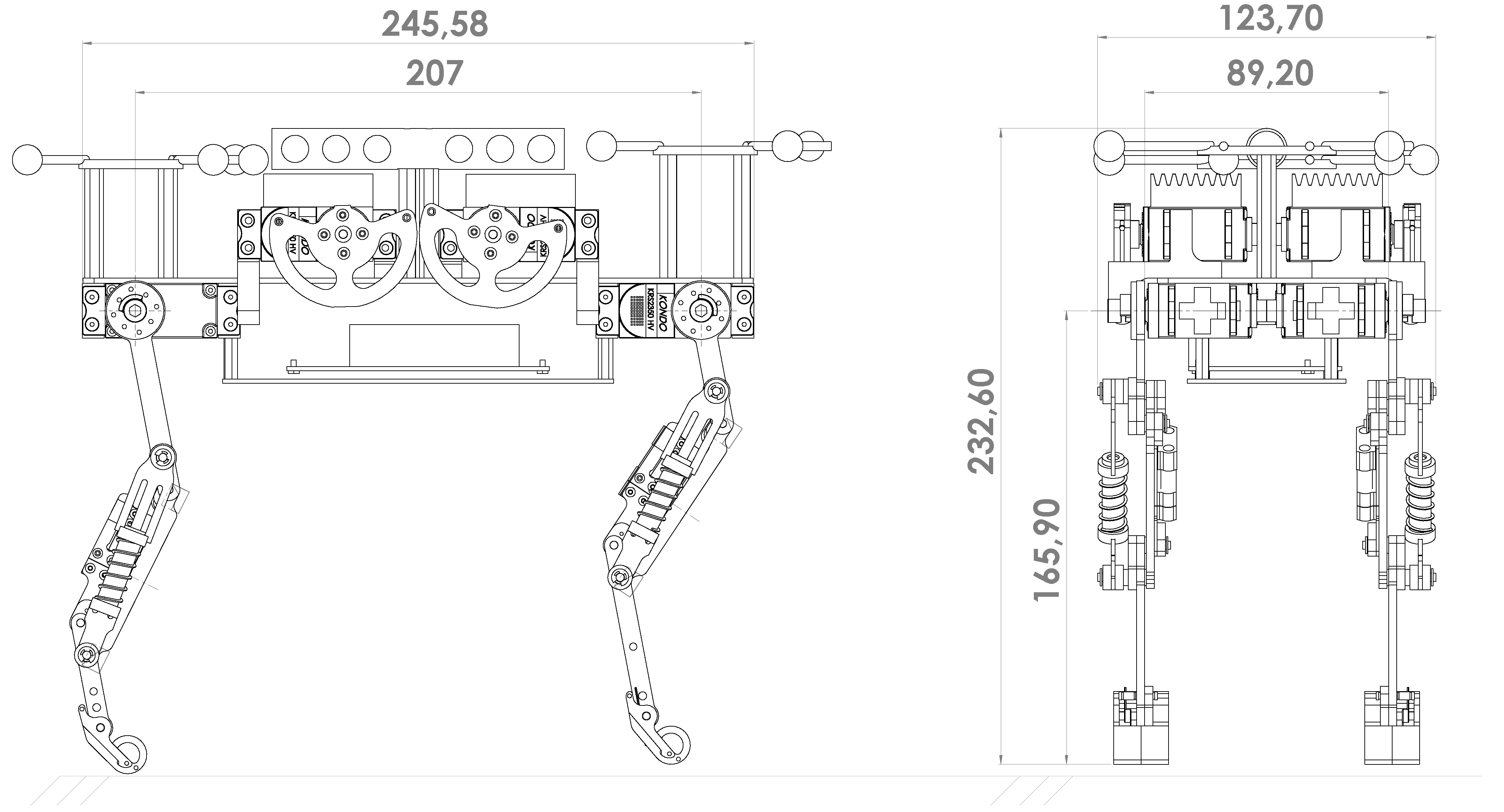
Cheetah-cub is a quadruped robot with advanced spring loaded pantographic legs, developed at the BIOROB-laboratory by Spröwitz and Vespignani . Its actuation consists of 8 Kondo KRS2350 ICS, which are positioned on the robot’s stiff trunk and are powered, through a cable connection, by a DC power supply. Thematerials used are mostly CNC milled carbon and glass fiber plates, CNC milled POM and 3D printed ABS parts. This material combination makes the robot very robust and at the same time very lightweight (m=1.1kg ). A RB110 control board with Linux installed as the operating system runs the pre-defined CPG network as an open loop control (no sensors on the robot). Cheetah-cub can reach fast forward locomotion of 6.9Bl/s and can do step downs of 20% of its leg length with high success rate. Additional tests showed also turning capability in low speeds.
Pictures
 |
 |
 |
|
Movies
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Related Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.On Designing An Active Tail For Body-Pitch Control In Legged Robots Via Decoupling Of Control Objectives
2016. 18th Climbing and Walking Robots Conference (CLAWAR), Hangzhou, PEOPLES R CHINA, SEP 06-09, 2015. p. 256-264. DOI : 10.1142/9789814725248_0033.On Designing an Active Tail for Legged Robots: Simplifying Control via Decoupling of Control Objectives
Industrial Robot: An International Journal. 2016. Vol. 43, num. 3, p. 338-346. DOI : 10.1108/IR-10-2015-0190.Cheetah-cub-S: Steering of a Quadruped Robot using Trunk Motion
2015. 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics, Purdue University, West Lafayette, Indiana, USA, October 18-20, 2015. DOI : 10.1109/SSRR.2015.7443021.Cheetah-cub-S: Steering of a Quadruped Robot using Trunk Motion
AMAM 2015, Camebridge, Massachusetts, USA, June 21 – 25, 2015.Data-driven extraction of drive functions for legged locomotion: A study on Cheetah-cub robot
6th International Conference on Adaptive Motion of Animals and Machines, 2013, Darmstadt, Germany, March 11-14, 2013.Towards Dynamic Trot Gait Locomotion—Design, Control and Experiments with Cheetah-cub, a Compliant Quadruped Robot
International Journal of Robotics Research. 2013. Vol. 32, num. 8, p. 932-950. DOI : 10.1177/0278364913489205.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows: Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.