Description
Cheetah-Cub was not fundamentally altered from its early development days. Some major changes are introduced with Cheetah-Cub-AL. The leg was redesigned and features now a (to the saggital plane of the leg) symmetric diagonal spring, canceling unwanted bending behavior present in previous Cheetah-Cub-versions. Additionally, making use of classical CNC-manufacturing techniques with aluminum in combination with ball-bearings in every joint, friction was reduced, alignment of the axis and repeatability of experiments were improved. The changes to the trunk are little but feature now easy access to the control board for development purposes. Another major change is the switch to a new operating system, Jokto, that improves stability and ease of use. Tuleu implemented inverse-kinematics of the legs for control purposes. This allowed to tune gaits much faster andmore intuitively. The robot was featured recently in Prof. Ijspeert’s talk in TED Global Geneva.
Pictures
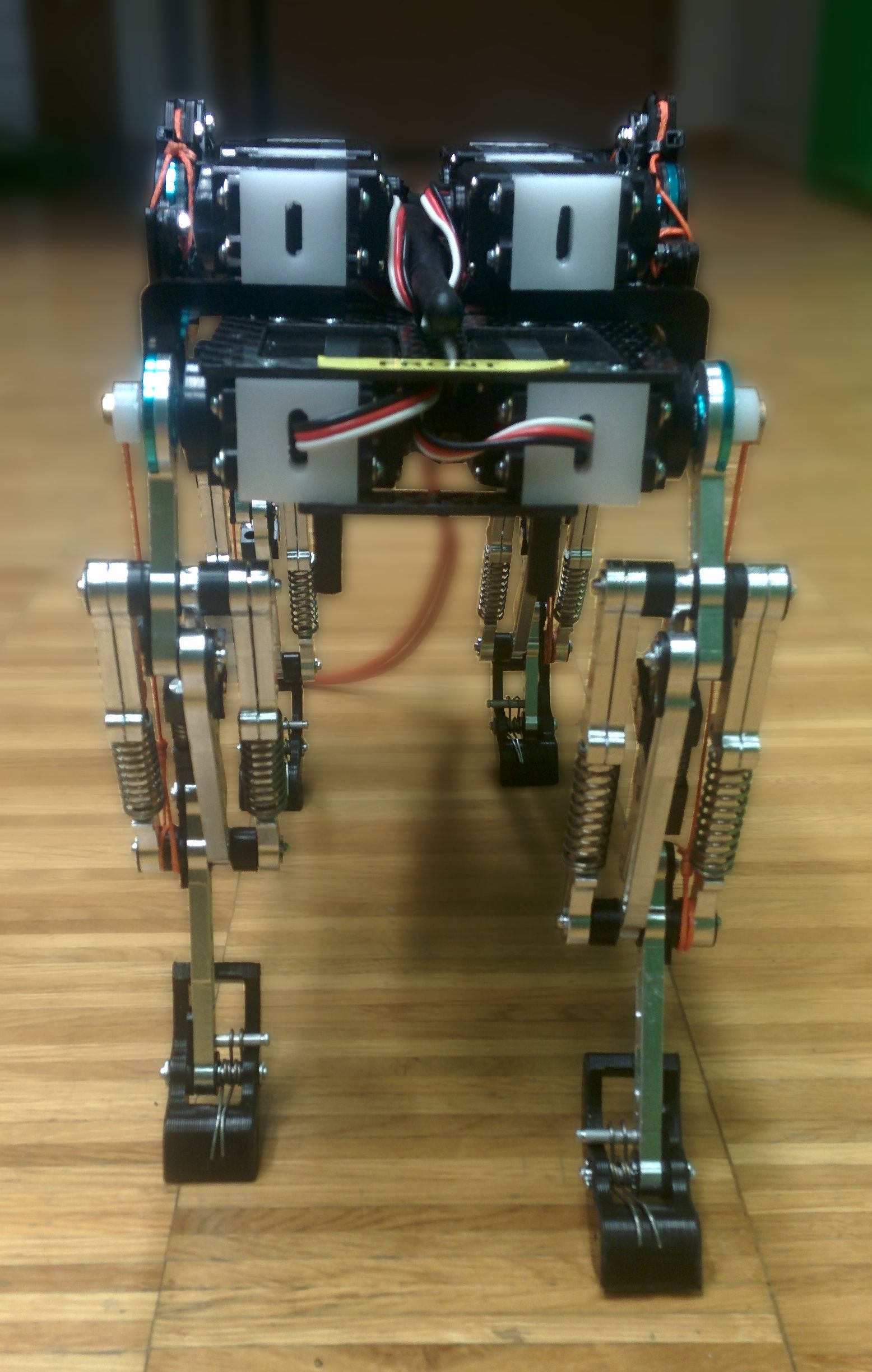 |
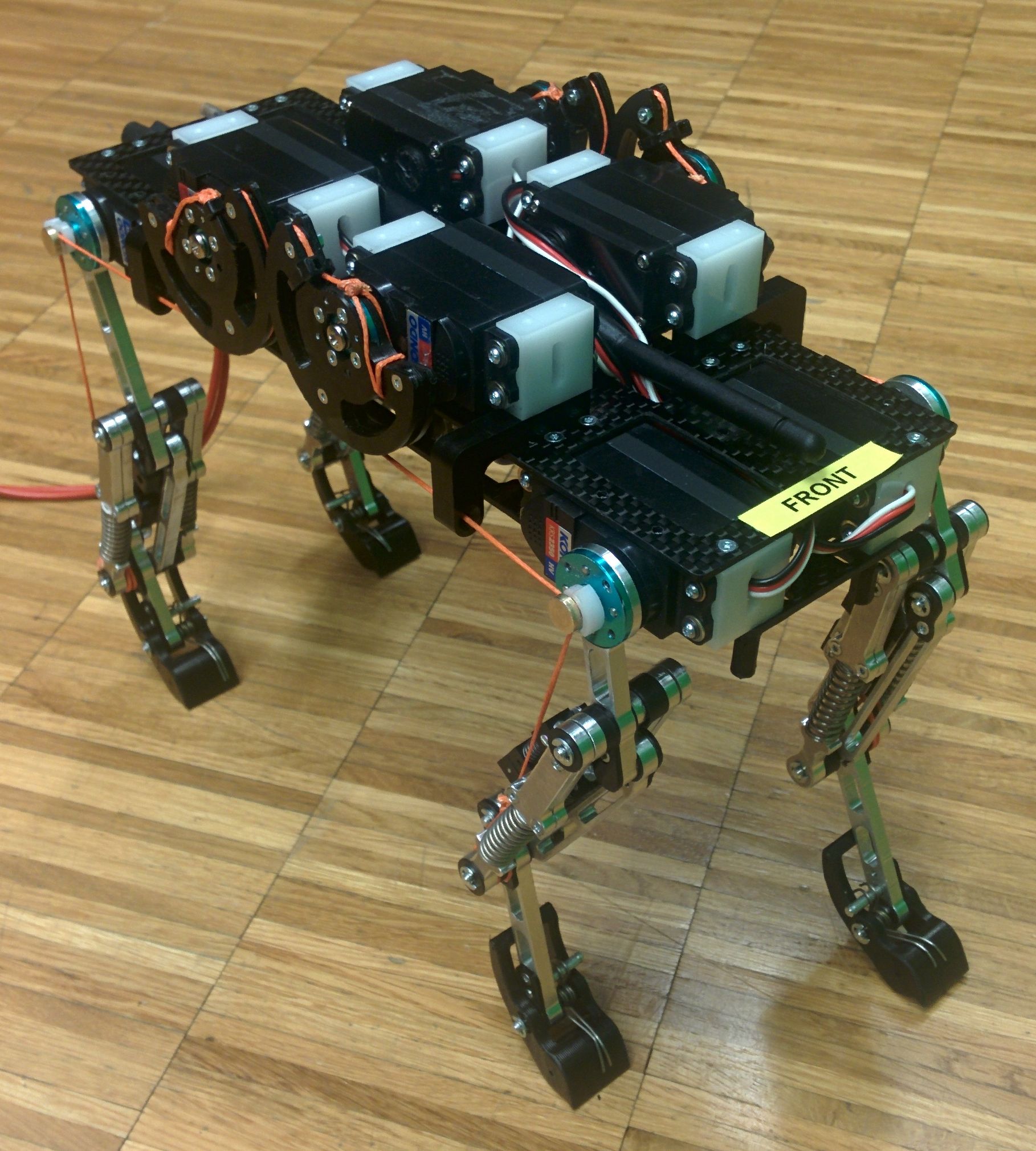 |
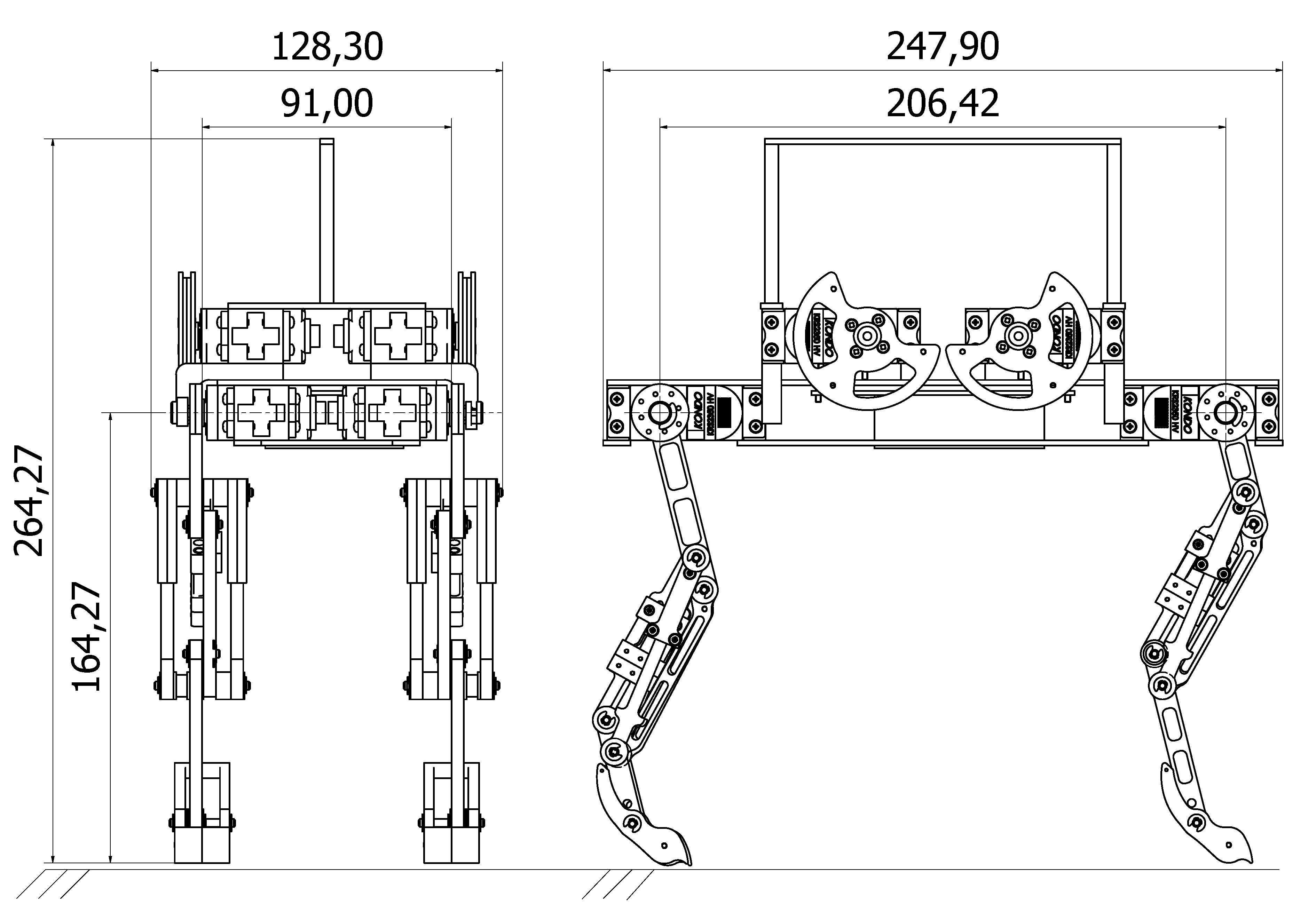 |
|
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Related Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Towards Agility: Definition, Benchmark and Design Considerations for Small, Quadrupedal Robots
Lausanne, EPFL, 2018.Copyright
Feel free to use pictures and movies without prior permission, provided they are credited as follows:Biorobotics Laboratory, EPFL. Please contact us by email at massimo.vespignani at epfl.ch or auke.ijspeert at epfl.ch if you would like additional information or higher resolution videos.