Abstract
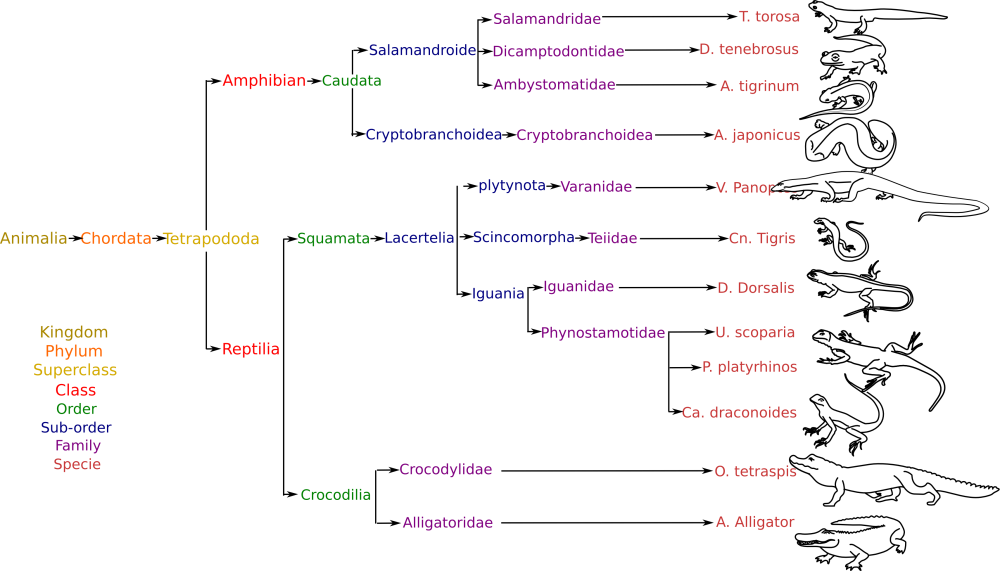
The design of a foot for a sprawling posture animal may vary as there are significant differences between biological species. A systematic search inside the taxonomy of different species (see image below), led to identify some representative organisms, some of them with related biomechanic literature, that serves as a basis to identify some differences as well as common characteristics across species. The outcome of this analysis, was a map that classifies some species, and groups them in clusters with similar biomechanic characteristics as speed, body mass, body length. This was important as is provided with some insights of how to look at the skeletal structure across species, to define important characteristics for the design of a robotic foot.
The next step, was the design of a generic foot, in which the dimensions, angles, aspect ratios and the kinematics of different species in general was condensed in simple parameters. A contribution so far was on the classification of morphologies and the extraction of simple parameters that allow the design of different feet for different sprawling animals. This previous analysis was implemented physically by modifying the compliant hand design of Pisa/IIT to match the expectations and design parameters of one selected organism, the Tiger salamander (Ambystoma tigrinum) foot. We chose this species, for two reasons, first because there is abundant literature on the skeletal structure of this animal, and second, because the implementation can be easily ported to robots like Pleurobot. Then, We scaled up the dimensions of the organism foot, according to the kinematics of the experimental setup used to test the foot.


A set of experiments were carried out using the MoCap to retrieve the kinematics of the foot and the force plates, in order to compare with the results, especially ground reaction forces (GRF), with the literature. The experimental setup built for this purpose, consisted in a simulated planar robotic leg with a rail that allow the horizontal displacement of the “body” while maintaining the foot static with the force plate. Vertical motion was constrained which affects the GRF, but still allowing an interesting visualization of the behavior of the normal forces along the whole standing phase.




















The results of this project were merely quantified to validate the design and to provide a tool for the lab for both, design generic feet as well as to examine their behavior prior implement it in a real robot. For this reason, there is still a lot of work to be done on this area. In the biological classification and extraction of features for foot design as well as their implementation and validation. Nevertheless, We hope this report and all the interesting contributions on it will create a useful precedent for future work in the EPFL’s Biorobotics Lab.
Documents
Full report can be found here
Midterm presentation here
Final presentation here
Multimedia
Salamander foot experimental setup (right click and save as)
Detail of the Motion Capture and Ground Reaction Forces (right click and save as)