Project abstract
Roombots are modular robots developed at BIRG, EPFL, to build adaptable furnitures
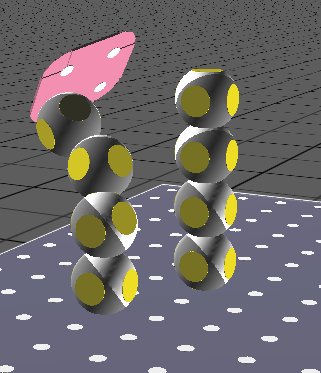
In this semester project, we improved the movements and trajectories of the Roombots meta-modules. We implemented a method for optimizing approaching method before locking to a external connector. We applied this method to handle passive plates.
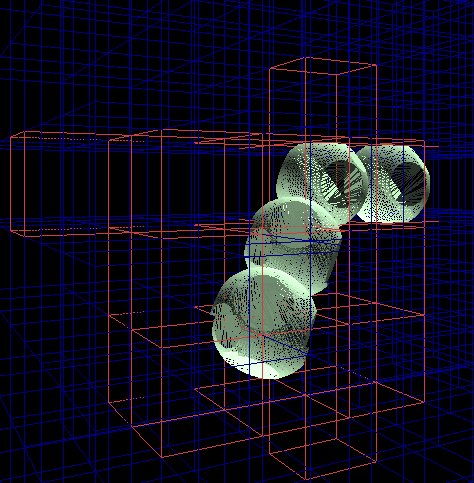
Then we worked on collision cloud, to optimize their computation and decrease their size with the overall goal of avoiding obstacles during movement and reconfiguration. We developped and compared several methods.
Time constraints leaded us to abandon the cooperative movement parts to be able to go into the collision cloud task in more details.
{kind=link}
{kind=link}
{kind=link}
Movies
 RB without VC |
 Handling passive plates |
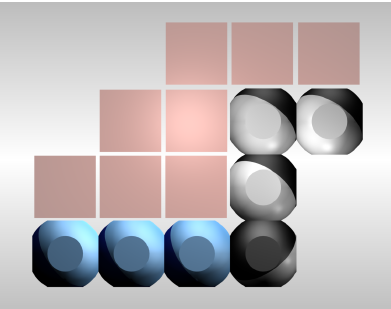
 Virtual connector, chair |
 Virtual connector, without |
 RB with VC |