Project Description
<!– CORRECTED LINKS: BEGIN (textBox id=”455554″. lang=en. title=Rehabilitation robotics at BIOROB): –><!– CORRECTED LINKS: END (textBox id=”455554″. lang=en. title=Rehabilitation robotics at BIOROB). –>
 Evryon: EVolving morphologies for human-Robot sYmbiotic interactiON
Evryon: EVolving morphologies for human-Robot sYmbiotic interactiON
2009-Feb-01 to 2012-May-31
The goal of the EVRYON project is to develop a novel approach for the design of wearable robots, where robot morphology and control are co-evolved and optimized together. The outcomes of this project are intended for a range of applications from rehabilitation to augmentation.
Using CPGs to control exoskeletons
<!– CORRECTED LINKS: BEGIN (textBox id=”455586″. lang=en. title=Using CPG to control exoskeletons): –><!– CORRECTED LINKS: END (textBox id=”455586″. lang=en. title=Using CPG to control exoskeletons). –>
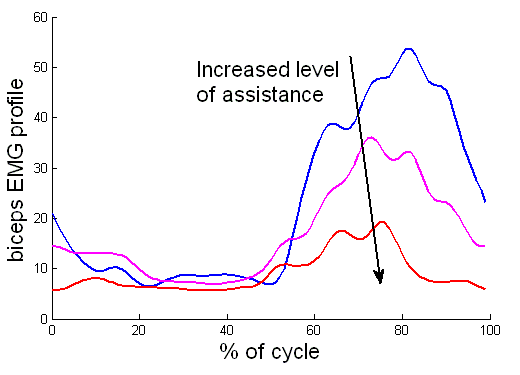
Exoskeletons are particular rehabilitation robots that are worn like an outer shell of the body. In collaboration with the ARTS lab at Scuola Superiore Sant’Anna (Pisa, Italy), we developed an innovative control method for an elbow exoskeleton (the NEUROExos) based on adaptive Central Pattern Generators. Conceptually, the elbow moving back and forth (continuous flexion/extension) can be viewed as an oscillator. The adaptive CPG comes to synchronize with this oscillator, and is able to learn its amplitude and frequency. In turn, the adaptive CPG feeds back some torque to the user through the joint actuator, therefore providing movement assistance.
 Human subject wearing the NEUROExos and performing cyclical elbow movements with the forearm like an inverted pendulum
(courtesy ARTS lab, SSSA, Italy). |
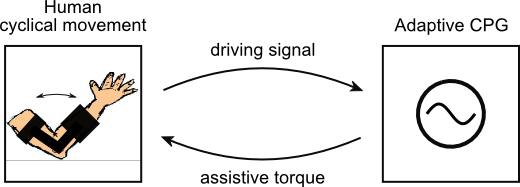
Sketchy diagram of the interaction between the elbow and the adaptive CPG. |
Co-optimization structure and control
<!– CORRECTED LINKS: BEGIN (textBox id=”455697″. lang=en. title=Co-optimizing structure and control): –><!– CORRECTED LINKS: END (textBox id=”455697″. lang=en. title=Co-optimizing structure and control). –>
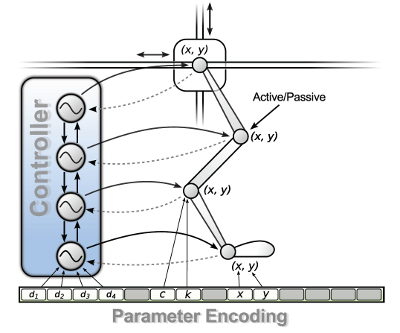
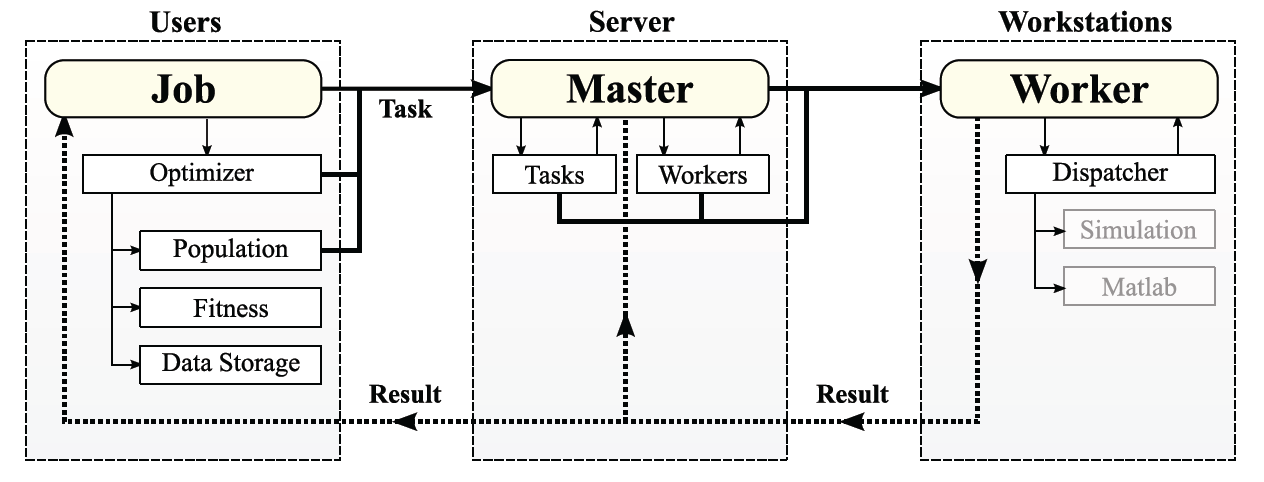
Developing wearable exoskeletons poses many challenges in term of energy efficiency, robustness, control, etc… For that reason, we also investigate advanced methods to optimize both the morphology (position of the links, number of actuators, …) and the control of a lower-limb exoskeleton. Ideally, both should be co-optimized, such that the device would embed a sort of “structural intelligence” resulting in efficient dynamical interactions between the user, the mechanics, and the controller.
Researchers
<!– CORRECTED LINKS: BEGIN (textBox id=”455715″. lang=en. title=People being involved in these projects): –><!– CORRECTED LINKS: END (textBox id=”455715″. lang=en. title=People being involved in these projects). –>