RESEARCH DATA
|
Status: Completed, 2011-2015 Doctor: Dr. Christopher Robeller, architect, IBOIS Thesis director: Prof. Yves Weinand, architect and engineer, IBOIS |
RESEARCH ABSTRACT
Abstract
Over the past decade, the popularity of timber as a building construction material has increased in central Europe. This is due to a growing awareness for the sustainability of building constructions, as well as a demand for prefabricated solutions, which allow for the use of automation technology. With its carbon-dioxide storage and a low weight-to-strength ratio, timber presents an ideal material for prefabrication and transportation.
Modern engineered timber panels such as cross-laminated timber (CLT), or laminated veneer lumber (LVL) add additional benefits: These laminates are available in large sizes; they are dimensionally stable and allow for a more homogenous, quasi-orthotropic mechanical behaviour, providing a high strength even for thin panels. Recently, the design of form-active surface structures with such panels has been the subject of several investigations and experimental prototypes in the fields of architectural geometry and civil engineering. While traditional timber-frame structures use timber panels only as a secondary structure for the cladding and cross-bracing of beams, new typologies such as Timber Folded Plates are using plate-assemblies as their primary, load-bearing structure. The folded geometry allows these structures to integrate a combined slab and plate action, resulting in equally efficient and elegant structures.
New challenging details are presented by these typologies: Previous investigations have identified the direct, load-bearing edgewise joints between the thin panels as a key challenge in such designs. The large amount of joints with variable dihedral angles requires not only a sufficiently rigid and stiff connection, but also a solution that allows for a simple, fast and precise assembly on site.
Inspired by traditional, handcrafted cabinetmaking joints, this thesis investigates the potential of new, CNC-prefabricated Integral Joints, where parts are connected through their geometry rather than through additional mechanical fasteners or adhesive bonding. The geometry, fabrication and assembly of these new joints is being implemented and tested through the development of algorithmic tools. This is followed up by a verification of the proposed methods through large- and small scale physical prototypes.
This thesis presents investigations ranging from an initial hybrid approach, where integral joints are combined with adhesive bonding, towards a completely integral mechanical attachment solution.Rather than presenting a generic solution for the edgewise jointing of engineered timber panels, the joints are developed as an intrinsic part of a structural system. The local joint geometry and the global structure geometry are seen in a close reciprocal relationship, considering and respecting each other’s strengths and constraints.
Being located at the intersection between architecture and civil engineering, this thesis primarily discusses questions related to the geometry, materials, fabrication and assembly of individual joints and structures, but it also integrates the basic mechanical concepts of the proposed systems. Separate investigations in the field of civil engineering have been initiated within this work.
Keywords: Integral Mechanical Attachment, Digital Fabrication, Timber Folded Plate Structures, Dovetail Joints, Design for Assembly
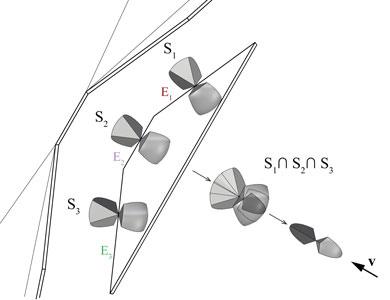
Image: Assembly Vector Rotation Windows visualize all possible assembly directions for a part with multiple fabrication- and assembly constrained 1DOF joints on non-parallel edges.
Joint Generation and Fabrication Algorithms
The video below demonstrates the use of two custom-built computational tools for the production of a surface-active “timber folded plate” structure, built from timber plate components. The plates are connected solely through form-fitting “integral” joints. The fabrication of these joints takes advantage of 5-axis CNC technology, which is widely available in timber construction companies.
The first tool is used for the geometry generation of the jointed plates. A Grasshopper Component has been developed using RhinoPython and the GHPython Plugin for Grasshopper. It will receive a polygon mesh as an input, as well as two basic parameters for the thickness of the plates and for the length of the individual tabs and slots. In addition, groups with custom settings can be chosen, if necessary. In the video, we see 8 inputs with custom settings, which are connected to a list with the IDs of the edges to which these custom settings are applied. The output of this tool will be two polyline “rails” per part, which provide all the information required for the fabrication tool.
The fabrication tool has been programed in RhinoPython. The input parameters of the “5x_jointing” function include the radius of the cutting tool, feed rates of the CNC router and some joint-specific options. Once the parameters are set, parts can be processed through a “window drag selection”. The G-Code is saved directly to the directory of the CNC router. Also, the toolpaths and tool rotations are visualized in Rhino3D, in order to double-check for possible problems before the machine is started.
This research was supported by the NCCR Digital Fabrication, funded by the Swiss National Science Foundation. (NCCR Digital Fabrication Agreement # 51NF40-141853)
Embed of video is only possible from Mediaspace, Vimeo or Youtube