
Dark Energy Spectroscopic Instrument (DESI)
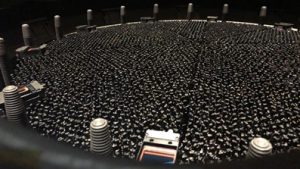
DESI’s focal plate with 5000 fiber-positioners
The Dark Energy Spectroscopic Instrument (DESI) will measure the effect of dark energy on the expansion of the universe. It will obtain optical spectra for tens of millions of galaxies and quasars, constructing a 3-dimensional map spanning the nearby universe to 10 billion light years.
DESI is currently running on the Mayall 4-meter telescope at Kitt Peak National Observatory and had its first light in 2019. DESI is supported by the Department of Energy Office of Science to perform this Stage IV dark energy measurement using baryon acoustic oscillations and other techniques that rely on spectroscopic measurements.
The DESI fiber system will constitutes of 5000 fiber-positioning actuators following an hexagonal distribution on the focal plane with a 10.4mm distance between actuators (center to center).
CHESbot
The CHESbot is a robotic positioner designed by a Spanish/Swiss collaboration for the DESI project. The mechanical concept consist of two coupled rotations. Both arms have the same length which allows the robot to reach its center and the covered area forms a full disc with a diameter of 12mm. The position accuracy of this robot is 5 micrometers RMS.
Both motors are located at the back of the positioner and use gear transmissions to move the arms. The advantage of this solution is that both motors are stationary (no moving cables) and that all the heat dissipation is generated far from the focal plane.
DESIbot
The DESIbot is a robotic positioner designed by the Lawrence Berkeley National Laboratory (LBNL) for the DESI project. The mechanical concept consist of two coupled rotations. Both arms have the same length which allows the robot to reach its center and the covered area forms a full disc with a diameter of 12mm. The position accuracy of this robot is 5 micrometers RMS.
In this design the motor of the second stage is moving with the rotation of the first stage. The advantage of this solution is that there is no gear transmission (other than reduction gears) between the motors and the arms.