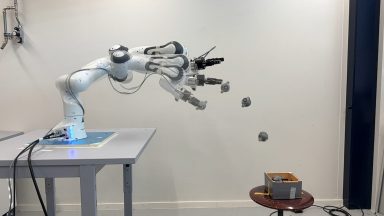
Research Catching Objects in Flight Robust Manipulation Deformable Objects Humanoid Design & Control Shared Control Dual-arm Fast Grabbing and Tossing objects Study of Human Dexterity Dynamic Manipulation Safety and Risk Mitigation