Want to do a master or semester project at LASA? Great choice!
Here you will find a list of the all the projects currently available. Click on any of the projects to access the details. To apply or request additional information, please contact to first person listed under “supervision”.
If you could not find anything here, we also offer non-listed master and semesters projects. Have a look at our current research project to see if something interests you.
Then, you can write an email to Prof. Aude Billard specifying which project you are interested in and which courses you followed related to the subject.


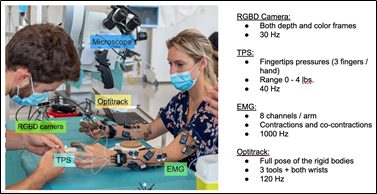

 Robotic cell schematic")



