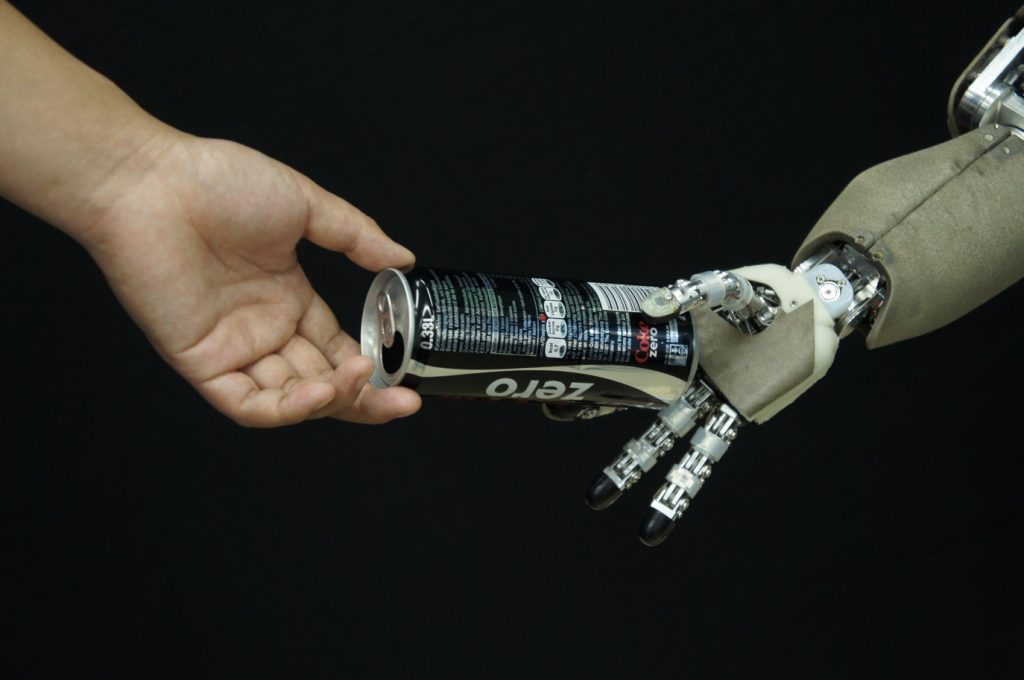



The human hand has incredible functionality. Our research focuses on understanding and replicating this capacity to robotic hands with very different kinematics.
We develop approaches and applications:
- grasp planning: generate a variety of task-oriented grasps with hands by leveraging various learning strategies e.g., off-line optimization, learning from human demonstration
- stable grasping: adapt the necessary force on-line to an object to achieve a safe grasp
- dexterous manipulation: able to complete tasks with complicated dexterous manipulation
- object interaction: learning an object manipulation strategy from human demonstration
Video playlist
Warning
ID YouTube introuvable