
Glove incorporating 3 of our stretchable pumps, one to circulate cooling liquid on wrist, and two driving fluidic artificial muscles on thumb and index finger
Researchers from the EPFL (Switzerland), Shibaura Institute of Technology (Japan), and the University of Electro-Communications (Japan) have developed a stretchable soft pump, that will enable new applications in soft and wearable robotics. This research was published in the journal Nature in August 2019.
 We developed a thin stretchable pump, that can be twisted, bent, stretched, all the while pushing liquid along the channel. Gram for gram, our pump performs like an aquarium pump or a workshop compressor, but is completely silent, and can be deformed into nearly any shape. The tube is now also the pump! This allows for integration in soft exoskeletons, in active clothes and in soft robots
We developed a thin stretchable pump, that can be twisted, bent, stretched, all the while pushing liquid along the channel. Gram for gram, our pump performs like an aquarium pump or a workshop compressor, but is completely silent, and can be deformed into nearly any shape. The tube is now also the pump! This allows for integration in soft exoskeletons, in active clothes and in soft robots
What is the performance of the soft pump?
Each one-gram module can generate a pressure of 0.1 atmospheres (0.1 bar, 1.5 psi). Connecting several pumps in series increases the pressure, proportional to the number of pumps. For example, 20 of our tiny pumps, weighting 20 grams in total, could be used to inflate a car’s tire (2 bar, 30 psi).
The pump can be powered by a small battery. here we show how the pump can push liquid form one chamber to the other of a soft heart shaped reservoir.
Pumps for soft machines
Fluid circulation has essential functions in both living organisms and in machines. Our own human hearts pumps blood throughout our body. Spiders push fluid in their legs to quickly extend them. Nearly all large machinery relies on hydraulics. Heat distribution and regulation for buildings and vehicles use pumped liquid. Most soft robots use pressurized fluids to move their compliant limbs.
Biological pumps are soft, but pumps for machines are rigid and noisy, limiting untethered and wearable applications of fluid circulation. Our stretchable pumps can be easily integrated into nearly any object, enabling embedding efficient and lightweight fluid circulation in soft robots, smart textiles for thermal regulation, and exoskeletons. We can now aim to develop artificial circulatory systems for robots that resemble more closely the structure and function of living organisms
Short-term applications of our stretchable pump:
- comfortable normal-looking clothing that includes stretchable pumps to cool or heat different regions
- soft exoskeletons to help workers safely lift loads. The soft pump pushes fluid in the artificial muscles that power the exoskeleton
- untethered and autonomous soft robots can squeeze through small openings or adapt their shape to the environment.
A self-contained fluidic muscle

Many soft robots use bending fluidic actuators, made of soft silicones, with a bellows-like shape. They bend when inflated, and generally are driven by a large external compressor. We bonded one of our soft pumps to such a fluidic actuator, to create a soft bending artificial muscles that requires only electrical power to bend. This is an important step towards untethered soft robots.
This self-contained fluidic actuator has no external fluidic connections, and is capable of large actuation.
Wearable pumps
Another important application of these soft pumps is circulating liquids in thin flexible tubes embedded in smart clothing, leading to garments that can actively cool or heat different regions of the body, required for instance by surgeons, athletes and pilots.
Stretchable pump integrated in a textile glove to actively circulate fluid to transport heat between regions on the body
How does the stretchable pump work ?
Our pump is based on ElectroHydroDynamics (EHD) a well-known but not fully understood principle. EHD pumps made from rigid materials have been used for decades, but till now, no one had developed a stretchable soft EHD pump.
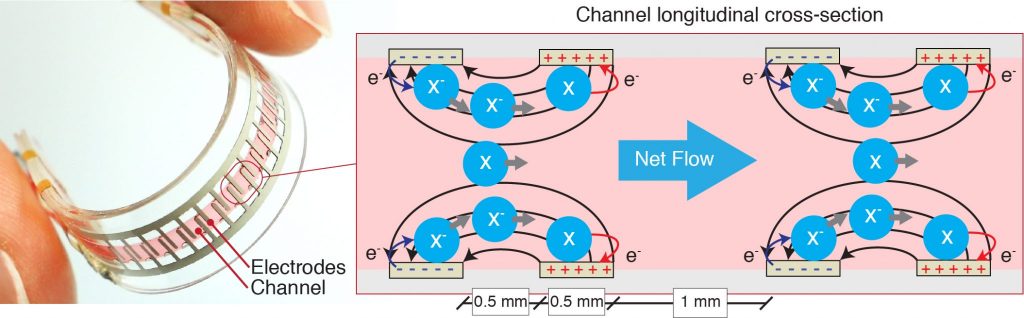
The EHD mechanism we use, described in the figure above, is called charge injection EHD. By using a set of interdigitated electrodes, we set up a series of regions of very high electric field in the liquid. Charge injection EHD is based on field emission: when the electric field is high enough (several thousand volts per mm), electrons are injected directly from the electrodes into the dielectric liquid. The ions (X−) thus formed are accelerated by the electric field until they discharge at an electrode. The ions drag along with them the neutral molecules in the liquid. This creates a net fluid flow. The flow direction can be inverted by simply inverting the polarity of the electric field. With no moving parts, there is no noise or wear.
For more info
For more information, please see the published paper paper: V. Cacucciolo et al, “Stretchable pumps for soft machines”, Nature 2019.
Where this work was done:
- EPFL Soft Transducers Lab (EPFL-LMTS). Dr. V. Cacucciolo, and Prof. H. Shea
- EPFL Laboratory of Intelligent Systems (EPFL-LIS). Dr. J. Shintake and Prof. D. Floreano
- Shibaura Institute of Technology, Y. Kuwajima and Prof. S. Maeda
- The University of Electro-Communications, Prof. J. Shintake
Funding. We warmly thank the following organisations for having supported this research: EPFL-STI; JSPS KAKENHI; MEXT/JSPS under Leading Initiative for Excellent Young Researchers; Swiss National Science Foundation through NCCR Robotics; Japanese TOBITATE! Young Ambassador Program; and the Hasler Foundation Cyber-Human Systems program.
Acknowledgments
We thank H. Shigemune for discussions about EHD, M. Imboden for assistance with the thermal regulation experiments, Prof G. Villanueva for insightful discussions, and O. Gudozhnik for developing the miniature 5 kV and 6 kV supplies shown below.
