Who is Rupert?
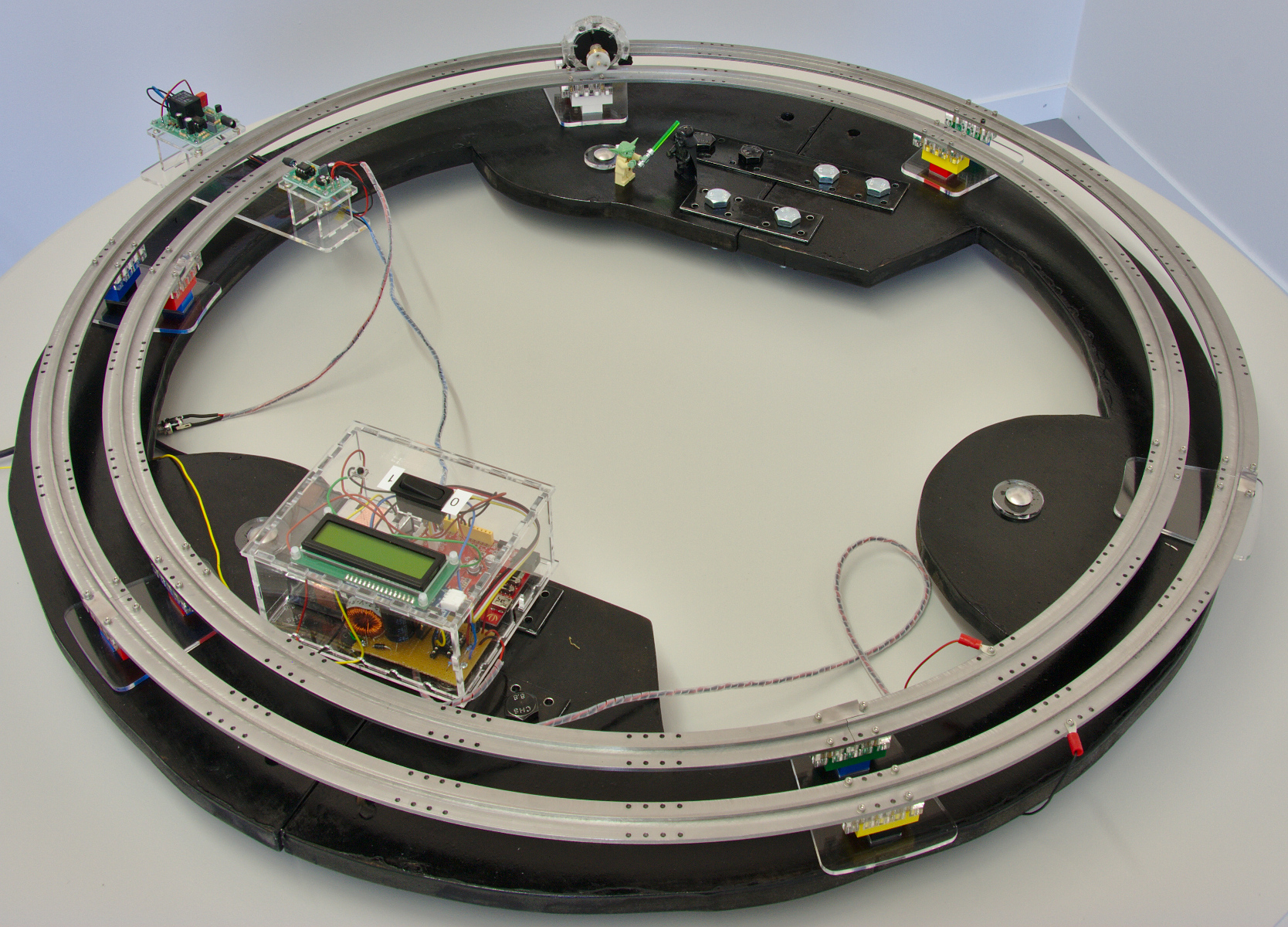
For the EAP in action session of the 2014 edition of the SPIE conference on Electroactive Polymer Actuators and Devices (EAPAD XVI, March 10-13, San Diego, CA) our lab has built a rolling robot named Rupert, based on our 3-phase DEA motor presented here. In the course of the 2 hours demo session, Rupert traveled 1150 m at a speed of 16.5 cm/s. That’s 535 turns or 21’000 cycles on each of its 6 actuators, and this without any failure! The force is strong with this one!
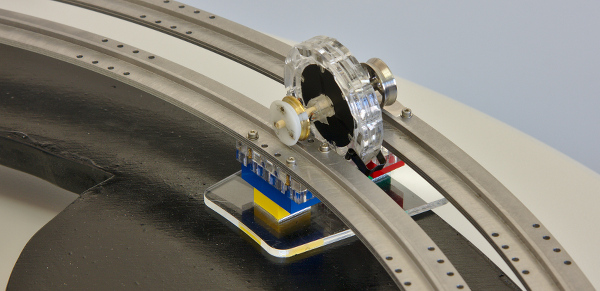
Although Rupert travels on metallic rails and has metallic wheels, the actuator itself is entirely based on polymer materials, and more precisely on soft dielectric elastomers actuators.
It scoots along at about 15 cm/s on its 2.15 m long circular track. Pretty impressive when we know that the total mass of the rolling structure is 18 g, but the active part only weighs 90 mg! Think of it as a 1000kg car having a 5kg engine!
This page provides explanations on Rupert operating principle.
Rupert’s guts
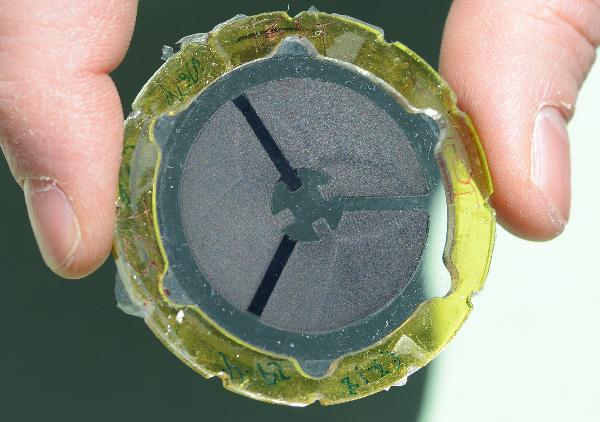
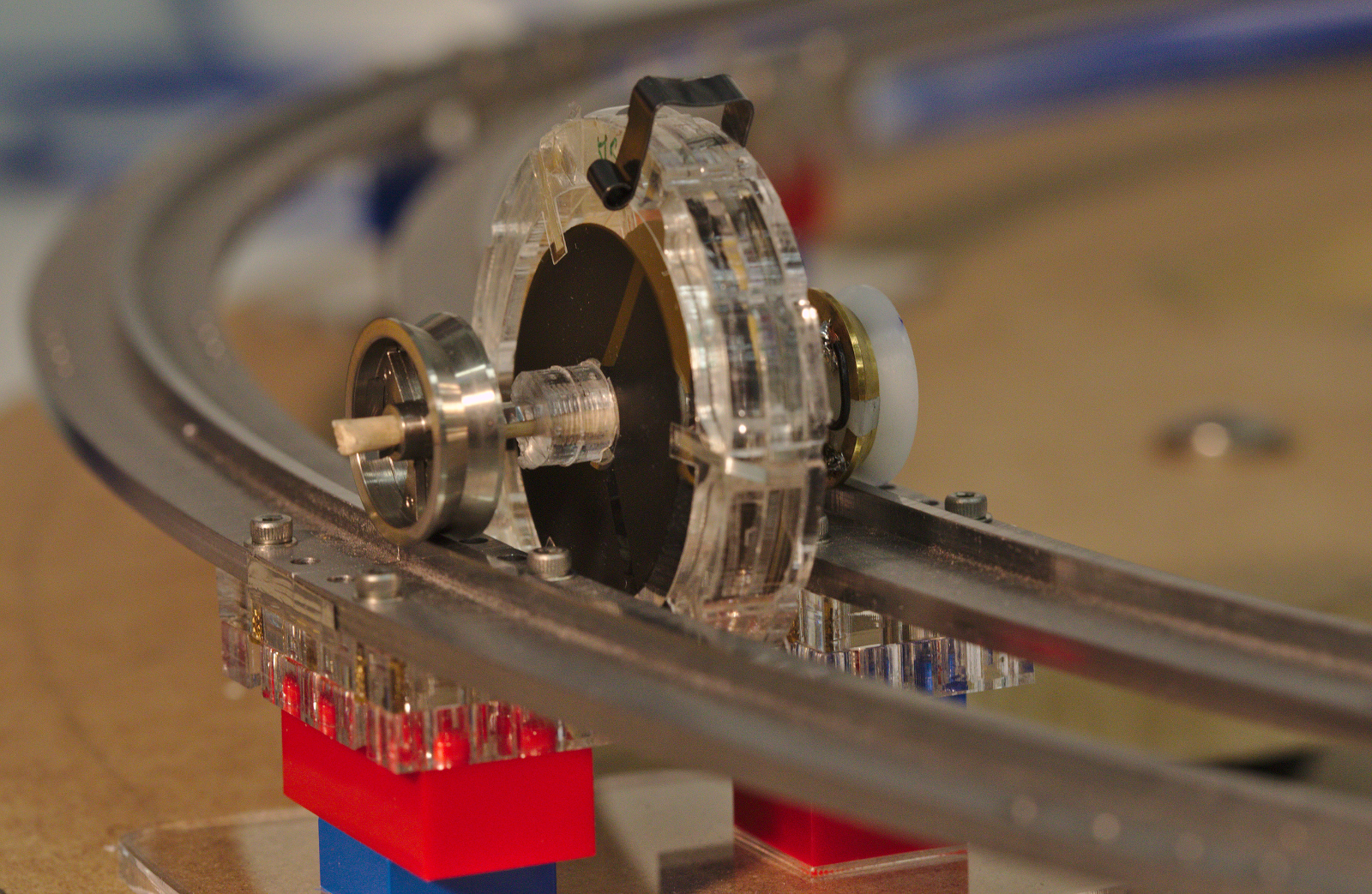
The robot consists of a prestretched soft silicone membrane on which electrodes are patterned (see photo below). On the high voltage size of the membrane (front side), 3 independent electrodes are patterned. We typically used Nusil CF19-2186 as a silicone and cast membranes for a final thickness of 30 µm once prestretched on the frame.
Two membranes with patterned electrodes are then placed back to back, and an axis is inserted at the center of the membrane. The rails and the wheels are used to transport the electrical charges on the electrodes. The ground wheel is a plain metallic wheel, while the high voltage wheel has three electrically independent sectors, each connected to one of the 3 phases on the membranes. When Rupert rolls, each sector of the wheel comes successively in contact with the rail, thus activating each phase, one after the other. Rupert is therefore self-commutating, and only requires a DC voltage to work.
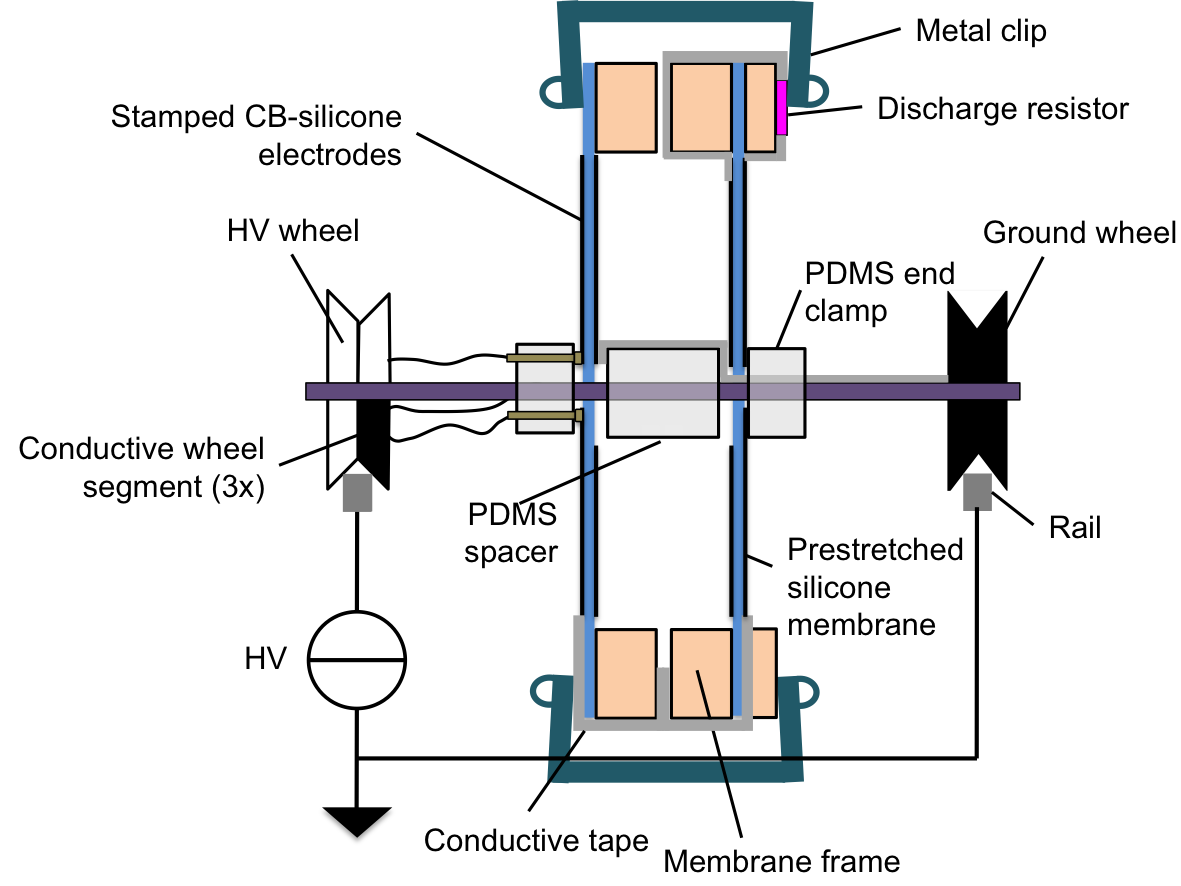
When one of the metallic sector on the high voltage wheel is in contact with the rails, the charges can flow from the power source onto the electrodes. When the sector losses contact with the rail, the connected phase is in an open-circuit state. A discharge resistor is therefore connected in parallel with each of the 3 phases of the actuator, to allow the actuator to discharge when not connected to the power supply.
Rupert’s secret
Ok, but what is Rupert’s secret? How does it work?
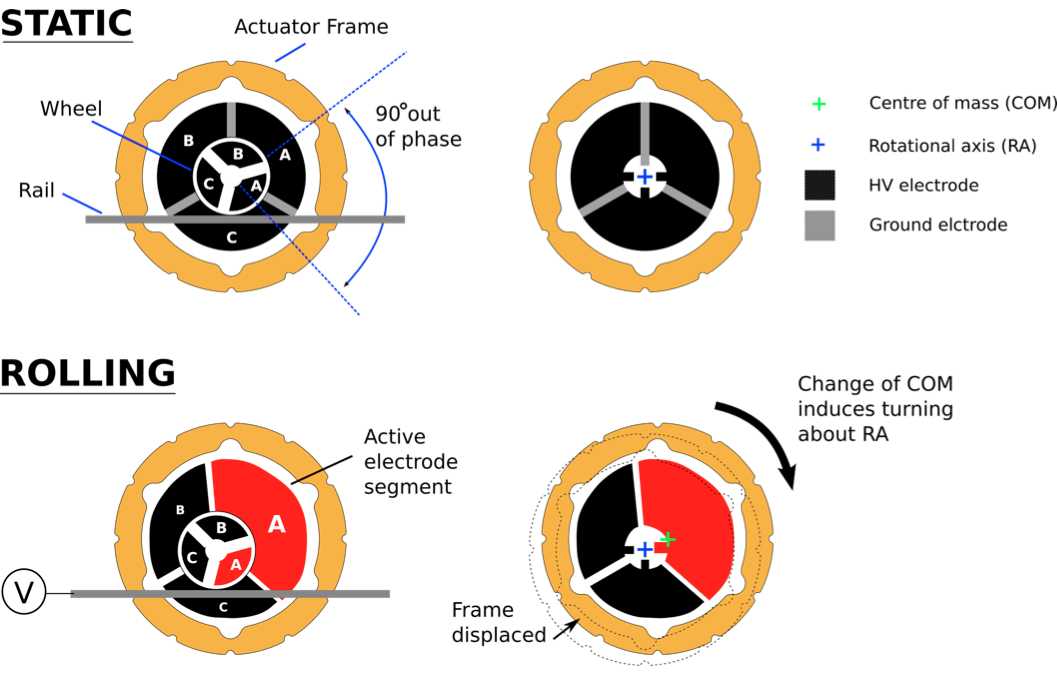
Rupert’s membrane has 3 independent electrodes, and its high voltage wheel has 3 independent sectors, each of which connected to one of the electrode pair on the membrane (A to A, B to B, and C to C). There is a 90° phase shift between the wheel and electrode sectors. When one sector of the wheel is in contact with the rails (A in the illustration above), the corresponding electrode will expand in area because of the induced Maxwell stress. This induces a shift of the outer plastic frame of the robot, where most of its mass is located. Consequently, the center of mass (COM) of the device shifts with respect to its rotational axis (RA). This induces a torque and causes the robot to roll clockwise. When the torque approaches 0 (the COM is vertically below the RA), the next sector of the wheel (B) enters in contact with the wheel. Electrode B is now expanded, and the motion continues.
Pictures and videos
(click to enlarge)
Embed of video is only possible from Mediaspace, Vimeo or Youtube
This awesome demonstration was made possible by very efficient teamwork. Many thanks to Seun Araromi, Luc Maffli, Alexandre Poulin, Tom McKay and Samuel Rosset for their contribution. Thank you to Ben O’Brien for the suggestion of a rolling robot.