Electrodes for dielectric elastomer actuators must be compliant (i.e. they must be able to stretch and remain conductive when deformed), but they also need to be precisely patterned, especially for miniaturized devices. If many solutions have been proposed for what to use as compliant electrodes (carbon powder, carbon grease, carbon black mixed with silicone, etc.), there has been much less work done on the development of techniques to apply these electrodes with precise and reproducible shapes on thin and soft elastomer membrane.
At EPFL-LMTS, we use pad printing to pattern electrodes on thin silicone membranes. The pad-printing process (described below) uses etched metal plates as “clichés” in which the desired pattern is etched, thus allowing to transfer precise shapes on the membrane.

- A membrane stretched on a frame is placed on the substrate holder. The silicone stamp is located above the membrane, and the etched part of the cliché is covered by the inkcup. This is the starting position of a pad printing cycle.
- The cliché slides on the left, exposing the pattern filled with ink (the rim of the inkpot acts as a doctor blade that scrapes the excess of ink on the cliché). Then the stamps comes down to pick-up the ink from the cliché. The stamps then comes back up to its starting position.
- The cliché slides on the right to bring the etched part back under the inkcup to be refilled with ink for the next cycle. At the same time, the stamps comes done and applied the ink on the membrane.
- The stames goes back to its starting position after having transfered the pattern on the membrane. The membrane can be removed from the substrate holder, and a new membrane can be installed.
We use a mixture of silicone and carbon black as compliant conductive ink. The ink is prepared by ball milling the carbon black and the silicone to obtain a homogenous paste. Some solvent is used to decrease the viscosity and obtain an ink of suitable consistancy for the pad printing process.
Pad printing is demonstrated in our video article:
Rosset, S., Araromi, O. A., Schlatter, S., Shea, H. R. Fabrication Process of Silicone-based Dielectric Elastomer Actuators. J. Vis. Exp. (108), e53423, doi:10.3791/53423 (2016).
Pictures of pad-printing process and electrodes
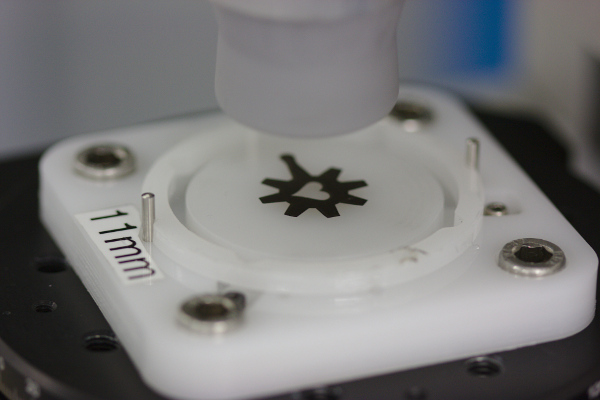
Cliché with design filled with ink and stamp ready to pick up the ink (corresponds to step 2 of the schematics above) |
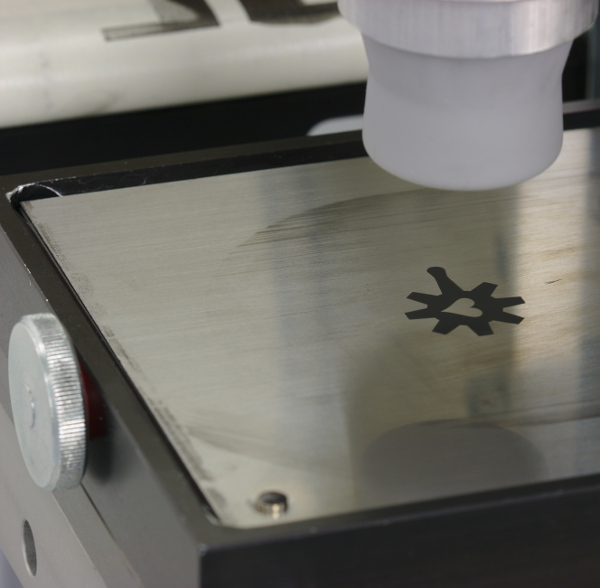
Design transfered on the membrane |
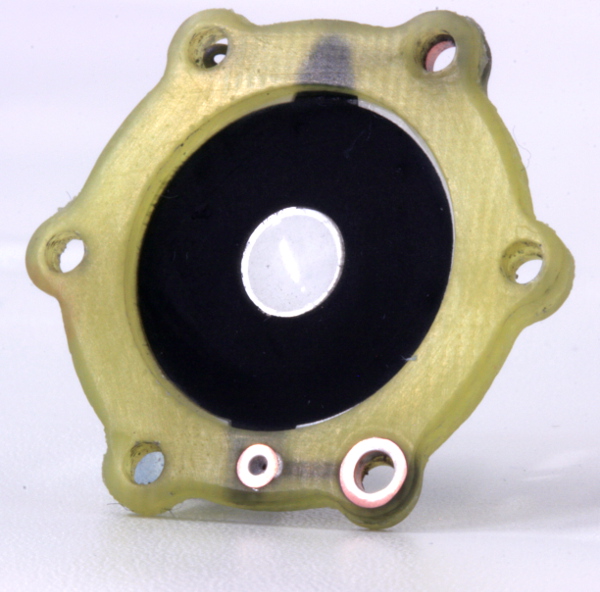
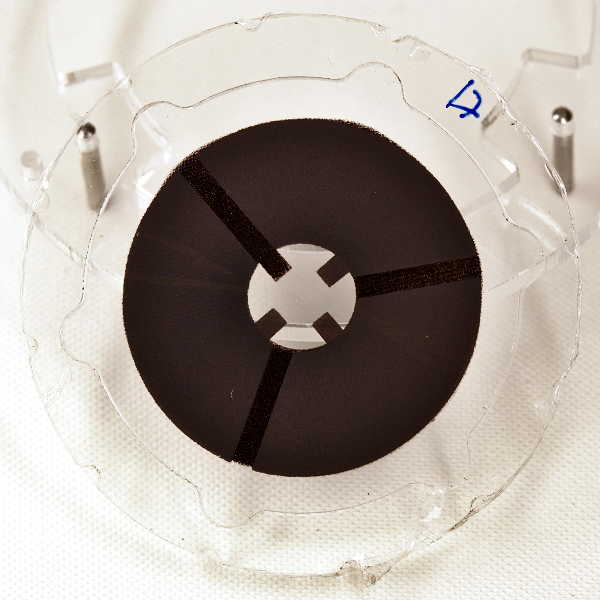
Tunable lens with annular pad-printed electrodes |
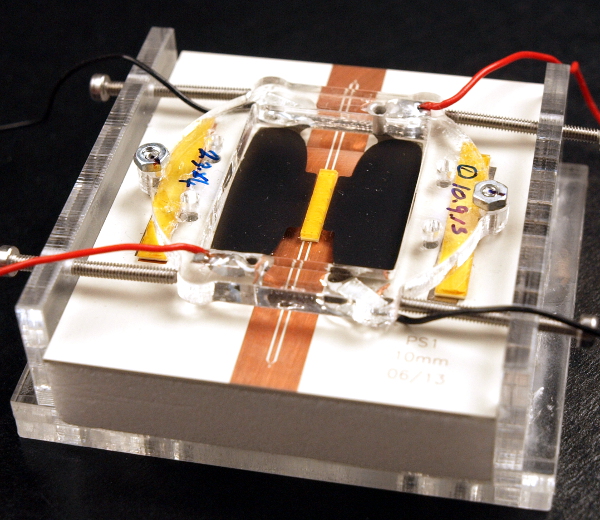
Reconfigurable mm-wave device with pad-printed electrodes |
3 independent electrodes patterned on a membrane for Rupert, the rolling robot. |
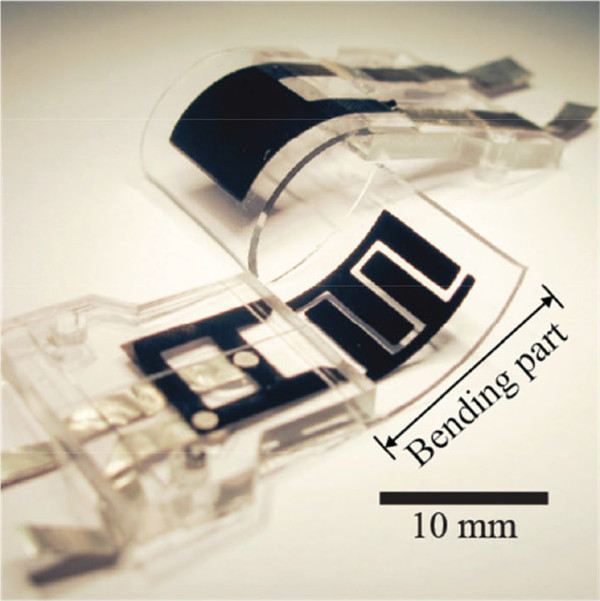
Bending actuators with intedigitated electrodes that combine DE actuation with electro-adhesion. |
Publications on the pad-printing process
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.