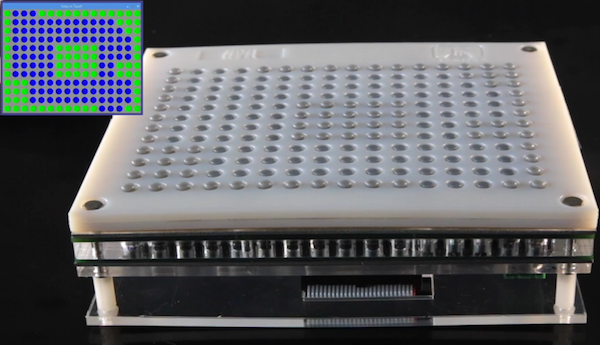
We have developed a scalable and manufacturable fast haptic display with 192 taxels on an 8 mm pitch with a 10 ms refresh time per taxel. The device consists of an array of 12×16 latching electromagnetic actuators using a novel magnetic shield concept, that enables high fill factor, and eliminates cross-talk.
Key parameters of our portable EM haptic display:
- 12 x 16 independently controlled taxels
- 10 milliseconds refresh time per taxel (enables vibration and rapid update of static images)
- 8 mm pitch between taxels
- 0.8 mm vertical travel
- 200 mN holding force (ie, easy to feel)
- latches in both up and down states
- controlled by USB or Bluetooth.
The user explores the pattern on the haptic display using his fingertips. He interacts with the display by pressing the integrated button on the side, or via a Bluetooth connected device like a PC, a tablet or a Raspberry Pi. Our goal is not oriented to Braille reading, but to provide graphical information such as geometrical figures, maps or even artwork.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Movie of our Haptic display (15 cm x 15 cm) based on a matrix of 12×16 moving pins that are electromagnetically actuated. The user touches smooth plastic taxels, driven by an array of high speed actuators.
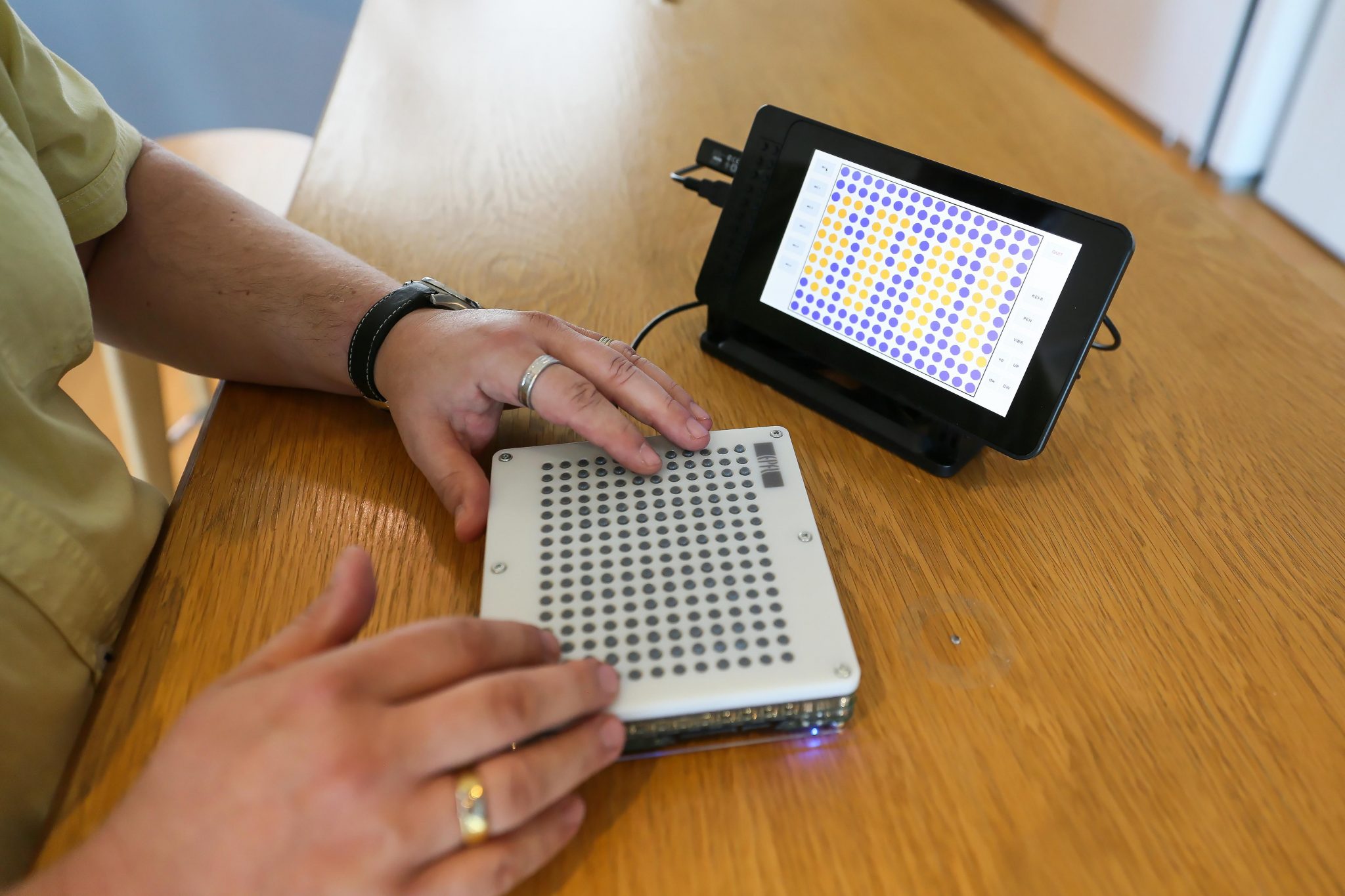
Volunteer using the haptic display. photo (C) EPFL Murielle Gerber
Electromagnetic (EM) actuation offers particularly appealing performance in terms of force, deflection, bandwidth, scaling, integration, robustness and portability. Our goal at EPFL-LMTS is to develop compact and portable EM tactile devices, with more than enough forces to be easily perceived. At the same time, we aim to keep power consumption, weight and cost within our target for a portable and accessible device.
This haptic display was developed with low cost in mind, and consists of a matrix of small magnets between two printed circuit boards (PCBs). A 3D printed interface is mounted on the magnetic actuators to provide a smooth and comfortable user experience. This approach gives us large vertical displacement (0.8 mm) coupled with very good holding forces (> 20 mN) and with refresh times of 10 milliseconds per taxel.
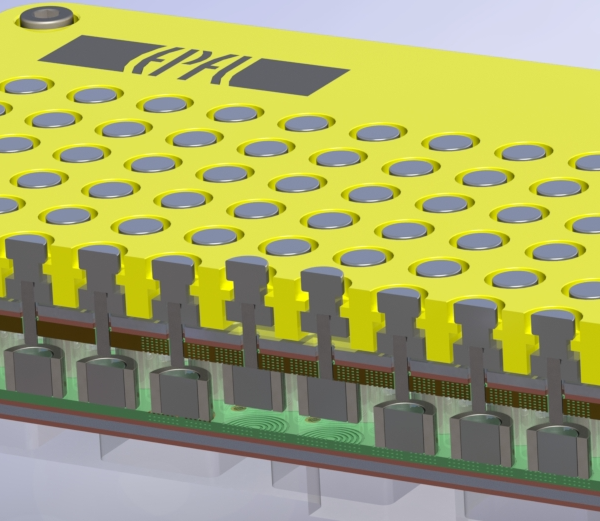
Controllingthe interactions between neighboring magnets is one of the most challenging obstacles in the design of dense array of EM actuators. We developed a highly effective solution, eliminating cross-talk by adding lightweight lateral shielding each cylindrical permanent magnet. This allows a dense and compact array of EM actuators using the smallest possible mass of soft-magnetic material. The ferromagnetic shielding reduces the interaction between neighboring taxels by over 10 times.
We use a bistable magnetic latching mechanism to keep taxel locked in either the up or down states with zero power consumption. Short current pusles of 10 milliseconds are sufficient to reliably switch the taxels from one state to the other. Holding forces are greater than 200 mN (ie very easy to feel). The device runs on its integrated Li-ion batteries for several hours under typical use conditions.
Applications include navigation (exploring a map by zooming and panning, as shown in the image below), serious gaming (e.g., tactile Pong for the visually impaired, or educational games), remote collaboration between sighted and visually-impaired users (remote user draws in real-time on the local haptic display).
Our publications on EM haptics
- J.J. Zarate et al, “Keep in Touch: Portable Haptic Display With 192 High Speed Taxels“, CHI 2017, May 2017, Denver, USA
- J. J. Zarate and H. Shea. Using pot-magnets to enable stable and scalable electromagnetic tactile displays, in IEEE Transactions on Haptics, p. 1-1, 2016. DOI: 10.1109/TOH.2016.2591951.
- J. J. Zarate, G. Tosolini, S. Petroni, M. D. Vittorio and H. Shea. Optimization of the force and power consumption of a microfabricated magnetic actuator, in Sensors and Actuators A: Physical, vol. 234, p. 57-64, 2015.
This project received partial funding from the European Commission within the BlindPAD Project (FP7/2007-2013 Grant Agreement No. 611621). ![]()