| Type | Master project in industry |
| Split | 30% Theory, 60% Software, 10% hardware |
| Knowledge | Programming skills (Python /C++/Matlab), ROS a plus |
| Subjects | Machine Learning, Robot Control, Simulation |
| Supervision | Farshad Khadivar |
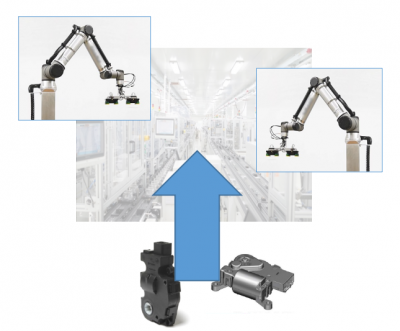
In industrial manufacturing, large series of identical products can very efficiently be manufactured on automated production lines with a one-piece flow. On the other hand, when series are very low, assisted manual assembly is the most cost-effective solution, even in high-wage countries. The most challenging scenario is however the mid-volume production ranges, where neither a dedicated production line is cost-effective, nor the labor intensity is too costly to be executed by humans.
This gap can be filled by Industry 4.0-assisted flexible production lines equipped with smart manipulator robots.
In the project, we will look into the feasibility of prototyping such a solution where manipulators would require minimal time to switch production from one product group to another product group. In the frame of the project, we will assess the feasibility and correctness of the obtained results and look for ways to improve them.
This project is in collaboration with Johnson Electric (JE) and will be done in Murten and on Campus.
Johnson Electric (JE) and EPFL are working together to develop a proof-of-concept tool to solve the described problem.
Approach
Coming up…
Expectation
Coming up…
References
Coming up…