Smart Materials
- Project Summary
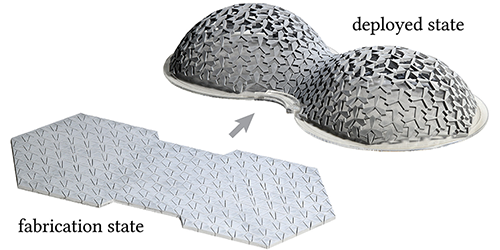
- Using insights from geometry and physical simulation, we can alter the behavior of materials to meet functional goals. For instance, we can cut slits into a solid, inextensible sheet of material to allow it to expand, and then by carefully designing these cuts, we can ensure the sheet pops into the curved surface of our choice when it is stretched. Or, we can design fine-scale microstructure geometry to create a 3D printed object that deforms in useful or surprising ways when forces are applied.
This approach to tailoring materials, known as metamaterial design, can enable exciting new fabrication methods and produce new classes of lightweight, robust designs. This project seeks to develop computational techniques and tools such as efficient PDE solvers and shape optimization algorithms to advance metamaterial research on several fronts.
Projects
Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

Computational Design of Flexible Planar Microstructures
ACM Transactions on Graphics. 2023. Vol. 42, num. 6, p. 185. DOI : 10.1145/3618396.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

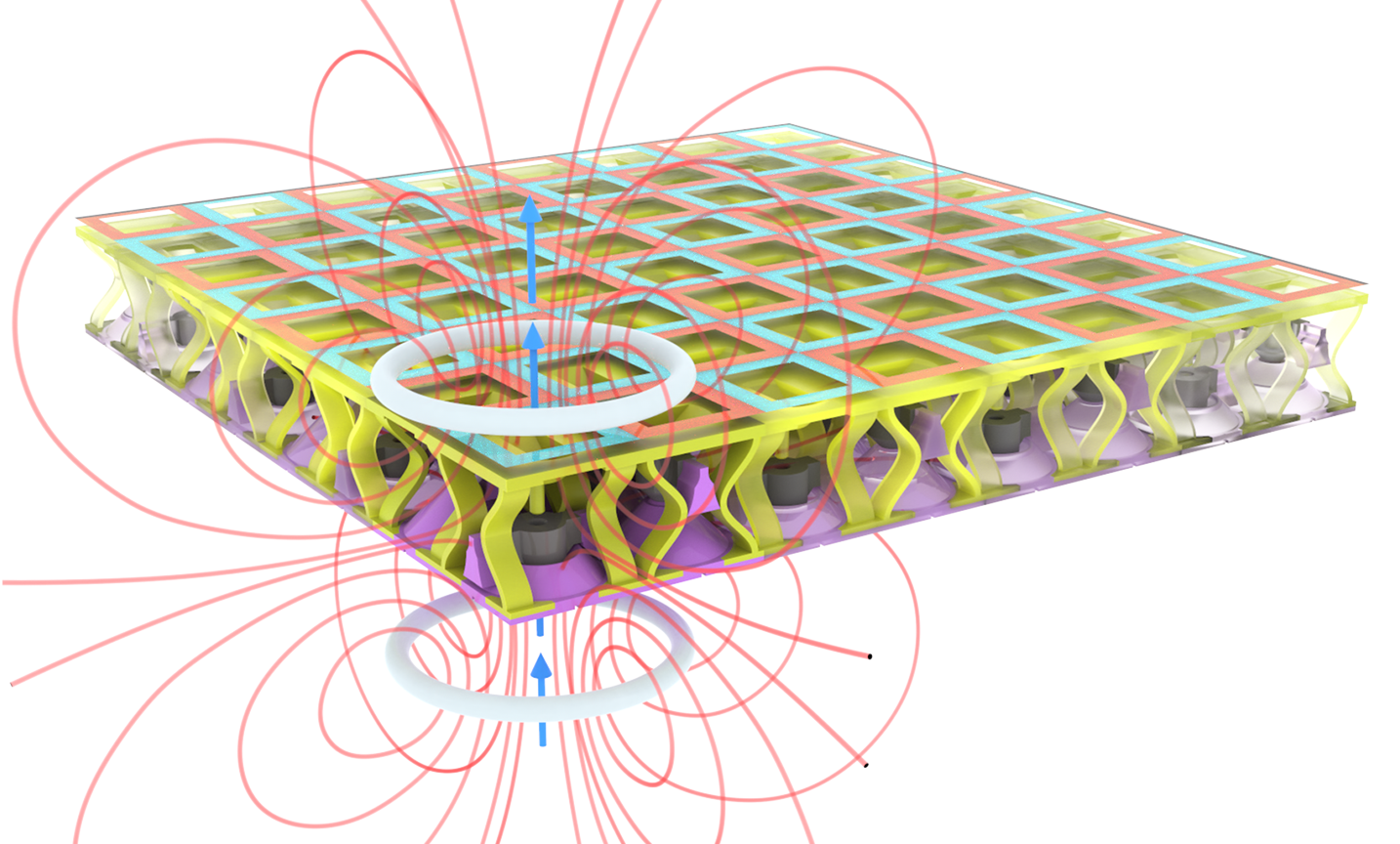
A reprogrammable mechanical metamaterial with stable memory
Nature. 2021-01-21. Vol. 589, num. 7842, p. 386-390. DOI : 10.1038/s41586-020-03123-5.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

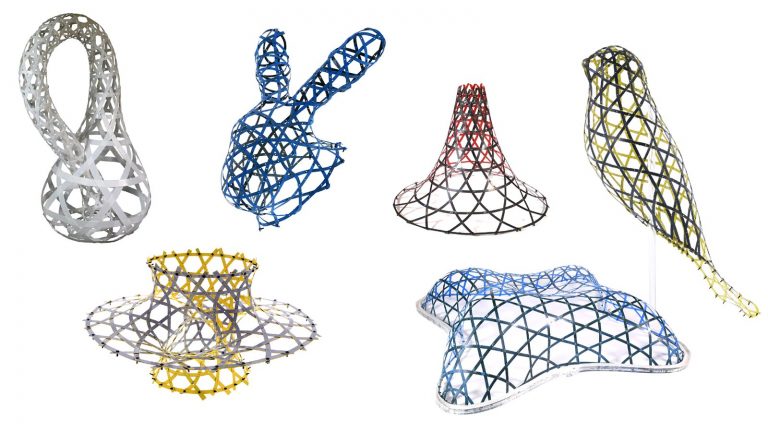
3D Weaving with Curved Ribbons
Acm Transactions On Graphics. 2021-08-01. Vol. 40, num. 4, p. 127. DOI : 10.1145/3450626.3459788.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
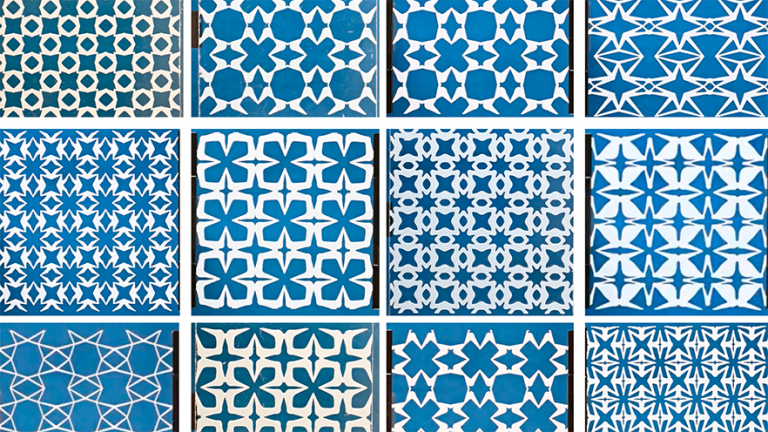
Bistable Auxetic Surface Structures
Acm Transactions On Graphics. 2021-08-01. Vol. 40, num. 4, p. 39. DOI : 10.1145/3450626.3459940.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

Computational Inverse Design of Surface-based Inflatables
Acm Transactions On Graphics. 2021-08-01. Vol. 40, num. 4, p. 40. DOI : 10.1145/3450626.3459789.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

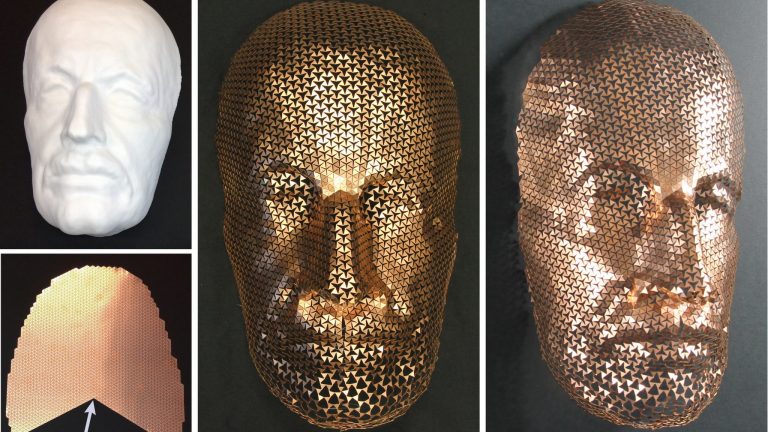
Rapid Deployment of Curved Surfaces via Programmable Auxetics
Acm Transactions On Graphics. 2018-08-01. Vol. 37, num. 4, p. 106. DOI : 10.1145/3197517.3201373.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Computational Design of Auxetic Shells
Lausanne, EPFL, 2019.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
