Deployable Structures
- Project Overview
- Shape-morphing structures are physical systems that can transition (morph) from one geometric state to another. They find applications in diverse fields, for example as deployable solar panels for satellites, medical implants such as heart stents, morphable air foils, smart textiles, soft robotics, building instrumentation, or tissue engineering. The shape-morphing deformation can be initiated by external forces, for example, a sheet of paper folded into an elaborate origami shape, or triggered by an internal actuation mechanism, such as inflation or swelling. Significant progress has been made in recent years in material science, mechanical engineering, and digital fabrication technologies. However, there are currently only very limited solutions to aid the design of shape-morphing surfaces. The intricate coupling of geometry, material, and actuation leads to highly complex shape spaces that cannot be explored effectively with existing tools. New computational methods are thus required to realize the full potential of shape-morphing surfaces and move beyond the limited set of geometries possible today. In this project we focus on deployable surface structures that can be fabricated in a simple state and then be actuated to a programmed 3D target state. This means that the deployed state is encoded in the fabrication state through locally prescribed deformation behavior. Our central goal is to develop novel computational tools for inverse design of such shape-morphing surfaces, that is, to find a suitable fabricable material state that can be automatically deployed to a functional 3D target shape.
Active Projects


Publications
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

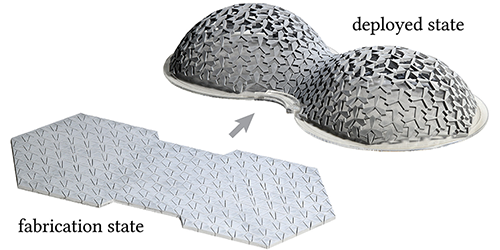
Computational Homogenization for Inverse Design of Surface-based Inflatables
ACM Transactions on Graphics. 2024. Vol. 43, num. 4. DOI : 10.1145/3658125.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

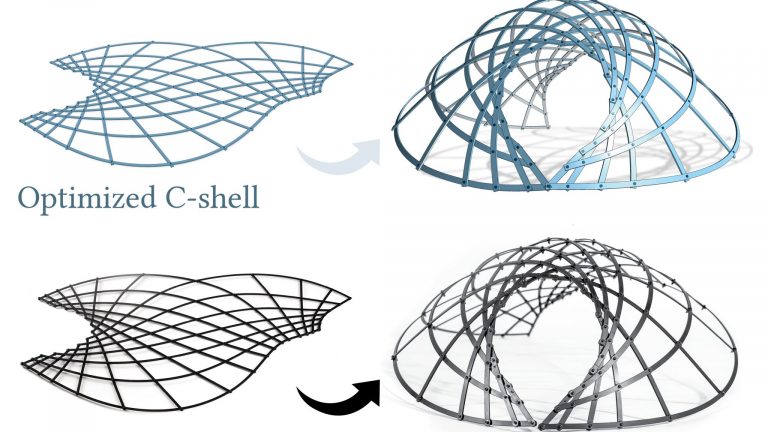
C-shells: Deployable Gridshells with Curved Beams
ACM Transactions on Graphics. 2023-12-15. Vol. 42, num. 6, p. 1-17. DOI : 10.1145/3618366.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

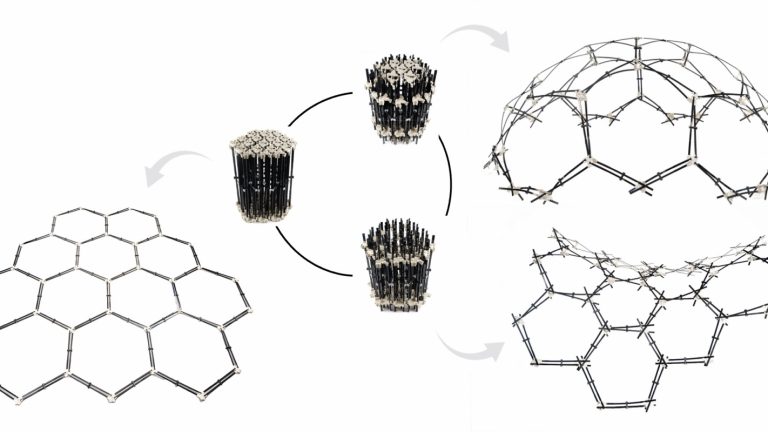
RUM: Reconfigurable Umbrella Mesh
Advances in Architectural Geometry 2023; De Gruyter, 2023. p. 474.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

Computational Exploration of Multistable Elastic Knots
ACM Transactions on Graphics. 2023. Vol. 42, num. 4, p. 1-15. DOI : 10.1145/3592399.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

BamX: Rethinking Deployability in Architecture through Weaving
Advances in Architectural Geometry 2023; De Gruyter, 2023-10-04.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

Umbrella Meshes: Elastic Mechanisms for Freeform Shape Deployment
ACM Transactions on Graphics. 2022. Vol. 41, num. 4, p. 1-15. DOI : 10.1145/3528223.3530089.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Bistable Auxetic Surface Structures
Acm Transactions On Graphics. 2021-08-01. Vol. 40, num. 4, p. 39. DOI : 10.1145/3450626.3459940.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

Computational Inverse Design of Surface-based Inflatables
Acm Transactions On Graphics. 2021-08-01. Vol. 40, num. 4, p. 40. DOI : 10.1145/3450626.3459789.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

X-Shells: A new class of deployable beam structures
Acm Transactions On Graphics. 2019-07-01. Vol. 38, num. 4, p. 83. DOI : 10.1145/3306346.3323040.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

X-Shell Pavilion: A Deployable Elastic Rod Structure
2019. IASS Annual Symposium, Barcelona, Spain,Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

chi-Shell, a new spatial deployable lattice compared to traditional reticulated shells
2019-01-01. 60th Anniversary Symposium of the International-Association-for-Shell-and-Spatial-Structures (IASS SYMPOSIUM) / 9th International Conference on Textile Composites and Inflatable Structures (STRUCTURAL MEMBRANES), Barcelona, SPAIN, Oct 07-10, 2019. p. 1932-1939.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.

Rapid Deployment of Curved Surfaces via Programmable Auxetics
Acm Transactions On Graphics. 2018-08-01. Vol. 37, num. 4, p. 106. DOI : 10.1145/3197517.3201373.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.