Summary
In this project, we aim to evaluate the different outcomes of using a social robot to approach biology content in informative and narrative sessions designed by their teachers. The analysis is performed on both students’ and teachers’ experiences in the process. The study is planned to be divided into multiple group sessions (between 3 and 6 sessions – yet to be defined) throughout the school semester. The target audience is a minimum of 2 classes of the same age and the same curriculum with more than 10 students per class and their respective teachers.
Detailed Description
Recent studies have shown that using narratives for approaching biology content may produce better results than informative ways [1]. Similarly, using social robots to guide interactive activities for learning also shows a better engagement of young students compared to tablets or traditional methods (humans) [2]. This project has the goal of developing the architecture of a social robot to combine these two strategies: a robot capable of verbally communicating with young students to tell narratives of biology content. The content to be approached is chosen by the teachers according to their curriculum during the school year. The development and validation of this system will be done in partnership with the Learning Science department of ETHZ.
As part of the setup evaluation, we will investigate the following questions:
- Is there any significant difference in the learning outcomes between the narrative and informative conditions?
- Is there any significant difference in the Students’ perception regarding their experience in the conditions?
- Is there any significant difference between using or not the robot to do so?
Proposal for individual sessions comparing robots to humans
The analysis of such questions is performed by dividing the participant students into two different conditions regarding the tutor (a human and a robot) and two different conditions regarding the way of content approaching (narrative and informative), resulting in 4 potential conditions presented in Table 1.
|
Approaching/Tutor |
Robot |
Human |
|
Informative |
A social robot will approach the content in the informative paradigm |
A human will approach the content in the informative paradigm |
|
Narrative |
A social robot will approach the content through narratives |
A human will approach the content through narratives |
Ideally, for statistical validation, the desired number of participants per condition would be 15 students, resulting in a total of 60 students. We are designing individual sessions to last 10 minutes each, plus 5 minutes of setting up, so 15 minutes per student. A total of 15 hours is planned to finish this study for 1 session.
Proposal for group session using exclusively the robot
Here, we aim to compare the whole class taking the lessons with the robot in two situations: narrative versus informative approach.
Four sessions are planned, wherein two of them the robot is in the informative mode and in the other, the robot is in the narrative mode. Each session will be planned to last 30 minutes. One class will perform in condition A and the other will perform in condition B, as shown in Table 2. Classes are expected to have 10 students each at least.
|
Class |
Session 1 |
Session 2 |
Session 3 |
Session 4 |
Session 5 |
|
A |
Narrative |
Informative |
Narrative |
Informative |
Human-made Narrative |
|
B |
Informative |
Narrative |
Informative |
Narrative |
AI-made Narrative |
This project also aims o develop and analyze algorithms capable of autonomously creating text based on human inputs. Then, after validating that the system is generating consistent narratives, will aim to perform a comparison between the users’ perceptions interacting with the system in this condition.
Assessments
This study has the objective of evaluating both teachers’ and students’ experiences using social robots through the methods or indicators explained in the corresponding sections below:
Teachers
The teachers’ perception, in this case, is related to how they rate their experience in several aspects (e.g. intuitiveness, time to familiarise, robustness, usefulness) while participating in the activity’s design and checking students’ performance in these activities with the robot, using the tools we will provide. Data is collected through questionnaires and interviews (max 5 min).
Students
On the students side, we are interested in potential differences in the conditions regarding their self-reported personal perceptions, such as enjoyment, engagement, preferences, measures through questionnaires, and educational outcomes such as content fixation, and memorisation (learning gain), measured through pre- and post-tests.
Expected results and Hypotheses
According to the literature, social robots have the potential to increase students motivation, engagement and, consequentially sometimes, their learning gains. Choosing more ludic strategies, such as storytelling or narratives has also shown better results in young students.
Thus, one obvious guess is that students in the narrative conditions will perform better and present higher variation in their learning tests.
Moreover, in this study, we also expect to increase teachers’ motivation and build together with them Human-Robot Interactive activities that would fit their teaching goals in an easy and intuitive manner.
Therefore, the potential benefits of participating in this study are the opportunity for your students to interact with state-of-art social robots with high chances of promoting their learning in the chosen topic and providing your teachers with innovative technology developed at EPFL to easily program social robots, bringing novelty to their teaching methods and adding Human-Robot Interaction basic knowledge to their formation.
References
- Tobler, Samuel, et al. “Effects of narratives on undergraduate student understanding of fundamental concepts in biology.” at the 16th International Conference of the Learning Sciences (ICLS 2022), Hiroshima, Japan. 2022.
- Park, Hae Won, et al. “A model-free affective reinforcement learning approach to personalization of an autonomous social robot companion for early literacy education.” Proceedings of the AAAI Conference on Artificial Intelligence. Vol. 33. No. 01. 2019.
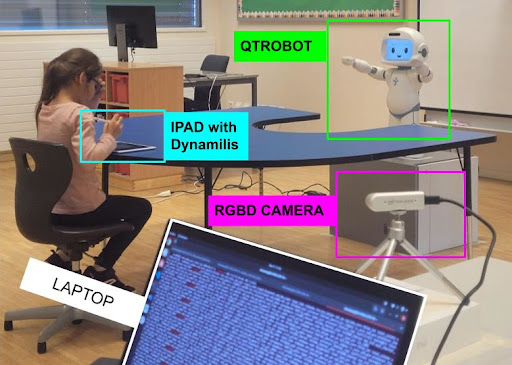
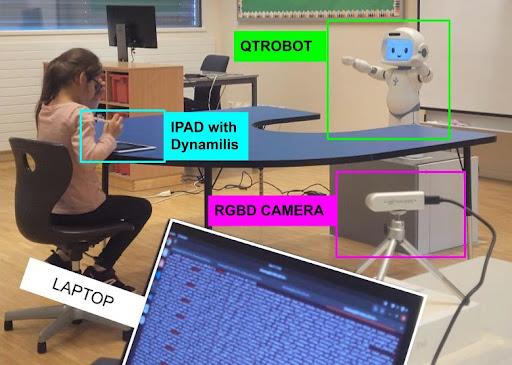
In the iReCHeCk project, we propose a finer characterization of handwriting, as a multimodal activity, taking into account the body posture to capture important features in the handwriting process. We are working on engaging training activities with a robot to monitor the learning status of the child, allowing teachers to evaluate progress while adapting the robot’s attitude and the training task to the needs of the learner. Our goal is to touch a wide range of handwriting learners, by providing schools with a long-term setup where students can play with no supervision while the system collects and adapts information to customise these interactions. The teachers’ role is to analyse the students’ performance through intuitive and visual tools provided by the researchers and collaborate to build better versions of these tools.
The pilot setup of iReCHeCk is shown in the picture below (final setup is less large):
In this study, we aim to investigate:
- Students’ motivation in performing handwriting activities when the robot is guiding the session
- Potential changes in students’ behaviors when teachers team up with the robot
- Impacts of productive breaks in long sessions
- The impact on the students outcome of different robot’s behaviour
- Teachers understanding of how social robots can be supportive tools in learning
- Impact of visual analysis tools as feedback of unsupervised activities
Duration: 2 semesters (8 months).
Productive breaks
While performing long sessions of training for physical or even mental activities, breaks are crucial for resting the body – and the brain – to retake a good performance in the current activity. Different ways of making the break are available, such as free breaks, guided stretching and breathing sessions, pauses for eating, taking a walk around, and so on. Since we found a correlation between handwriting and body posture in one of our previous studies, we aim to explore also how breaks and small moving exercises can influence the students performance in handwriting. This study will suggest different breaks recommended by the robot during practice sessions of handwriting that last, on average, 30 minutes to analyse whether (and how) they potentially changed students outcomes.
Minimum participants required: 30 students of the same age and school year.
Duration: 1 month.
Teachers awareness of Social Robots as handwriting-supporting assistants
The robot will guide the sessions autonomously. Thus, the concern of the teachers will be to follow up on their students progression through the report generated by our system. Further than that, we also want to study teachers awareness of how they can best use Social Robots in their activities related to the three aspects that social robots can provide: Technical, Social and Educative. The evaluation will consist of a series of participatory designs with the teachers and feedback sessions to enhance the tools. Investigation in this branch is with regards to the teachers’ (i) technological knowledge and (ii) feedback on the developed tools.
Immediate feedback vs no feedback
Since the system is able to give immediate feedback to the students, we aim to analyse the effects of a setup where the robot provides this information to students compared to a scenario where the robot does not give it.

Children with immigrant history are those who moved from – or have their parents immigrating from – another country and, consequently, have grown in and different cultural environment than the one where they are currently living in, being potentially educated under the costumes from the original country, especially the idiom. In many cases, this divergence from their colleagues at school may lead these children to feel excluded – or actually cause the exclusion.
This is one of the issues that are not related to education but teachers have to deal with in their daily class routine, which most of the time, adds an extra layer to their things to concern, and consequently, spending time planning and tackling these problems.
Social Assistive Robots (SAR) are a potential alternative in such scenarios: They have partial automation to deal with the students individually, releasing time from teachers; they are attractive enough to motivate students coming from different contexts; they have the advantage of using AI algorithms to understand and speak almost every idiom.
The goals of this study are:
- Participatory designs with teachers to deeper understand the problem and search for the best solutions.
- An end-to-end investigation to propose together innovative tools, devices and methods to tackle the problem.
- The deployment and validation of the methods with the students, empirically evaluating the resulting data.
- Extension of the study to children’s parents and guardians to understand how
This study is a part of a project in collaboration with Sweden (KTH) and the Netherland (Windesheim University of Applied Sciences).
One of the main hypotheses regarding the underrated use of SAR in education is the lack of knowledge of teachers on the topic. This study will investigate the different layers of knowledge and experience teachers have with social robots and provide them with training and tools to better understand and design their own activities with robots.
Questions investigated in this study are:
- How long does it take for teachers to start creating HRI educational activities from scratch?
- What is the easiest way of promoting this kind of training without overwhelming the teachers?
- What type of material and methods are most effective?
- What is the best usage of social robots that we can achieve?
Duration: 1 semester
For further information, please contact Daniel Tozadore ([email protected])