In this project, we investigate the role of interactive tangible robots in supporting letter writing for children having attention and visual-motor coordination problems. Three features of the Cellulo robotic platform, in particular, haptic information, autonomous motion and synchronized behavior of multiple robots allow us to increase the multi-sensory feedback through letter writing process. Haptic features allow each child to receive individual instant feedback, autonomous motion makes the robot reproduce the ductus while synchronized robot behavior allows collaborative game design.

Iterative Design and Evaluation of a Tangible Robot-Assisted Handwriting Activity for Special Education
Frontiers in Robotics and AI. 2020-03-06. Vol. 7, p. 29. DOI : 10.3389/frobt.2020.00029.Using tabletop robots to promote inclusive classroom experiences
2020-06-22. IDC ’20: Interaction Design and Children, London, United Kingdom, June, 2020. p. 281–292. DOI : 10.1145/3392063.3394439.Bringing letters to life: handwriting with haptic-enabled tangible robots
2018. IDC ’18 Proceedings of the 17th ACM Conference on Interaction Design and Children, Trondheim, Norway, June 19 – 22, 2018. p. 219-230. DOI : 10.1145/3202185.3202747.The JUSThink project aims to improve the computational thinking skills of children by exercising algorithmic reasoning with and through graphs, where graphs are posed as a way to represent, reason with and solve a problem. It targets at fostering children’s understanding of abstract graphs through a collaborative problem solving task.
More information on the JusThink page
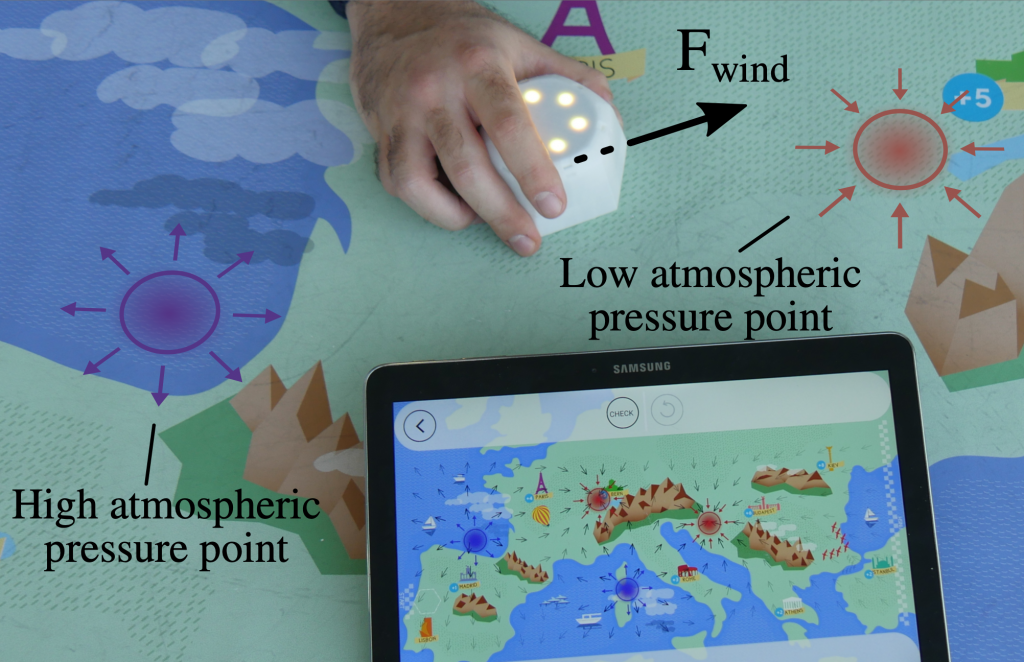
In order to show the potential of Cellulo in the classroom as part of standard curricular activities, we designed a learning activity called Windfield. It is designed as a semi-gamified activity where learners are taught how atmospheric pressure results in winds through a robotic simulation of “hot air balloons” over Europe. There are high and low-pressure points of various intensities that create outwards and inwards winds respectively at a distance; the strength of these wind forces are decayed with squared distance. The wind force at any given point on the map is then calculated as the vectorial sum of the wind forces created by all pressure points. The activity flow includes following steps:
- Feel the Wind with 2 pressure points: Exploration of wind and pressure mechanism with robots
- Informative video: Comprehension of wind mechanism and mid-term synthesis
- Feel the Wind with 4 pressure points: Application of wind mechanism knowledge
- Control the Wind: Transfer of knowledge into constructive use
Windfield: Demonstrating Wind Meteorology with Handheld Haptic Robots
2017. HRI ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, March 6-9, 2017. p. 48-49. DOI : 10.1145/3029798.3036664.Windfield: Learning Wind Meteorology with Handheld Haptic Robots
2017. ACM/IEEE International Conference on Human-Robot Interaction (HRI), Vienna, Austria, March 6-9, 2017. p. 156-165. DOI : 10.1145/2909824.3020231.These learning activities are supposed to make children understand why a coordinate system is useful for describing the prosition of an object. They will play a game of three persons to guide thier friend to find a lost astrounat in space.


Also the activities are accompanied with an awareness and orchestration teacher assistant tool. The teacher can use the tool to 1) Control the flow of activities 2) monitor the progress of all groups in a glance (to find out which group needs help or thier robot does not work) 3) use a detailed dashbaord page to compare studnets activity over different activities and debreif the lesson.
