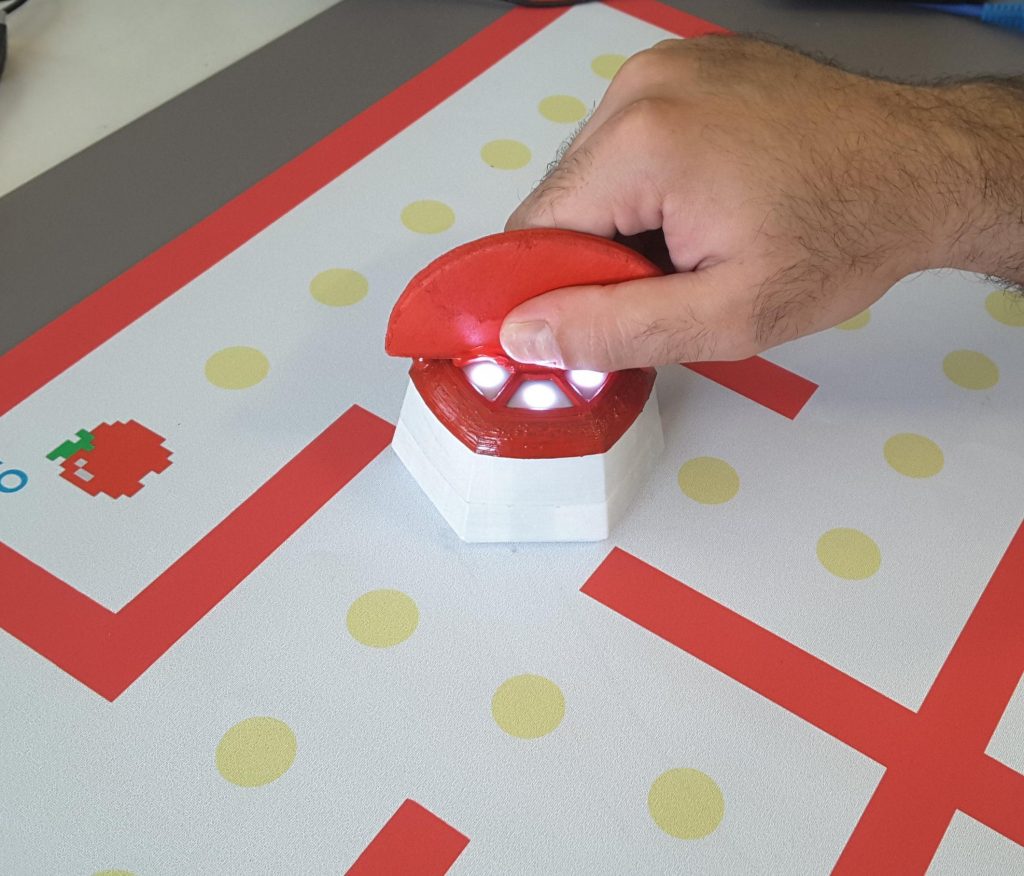
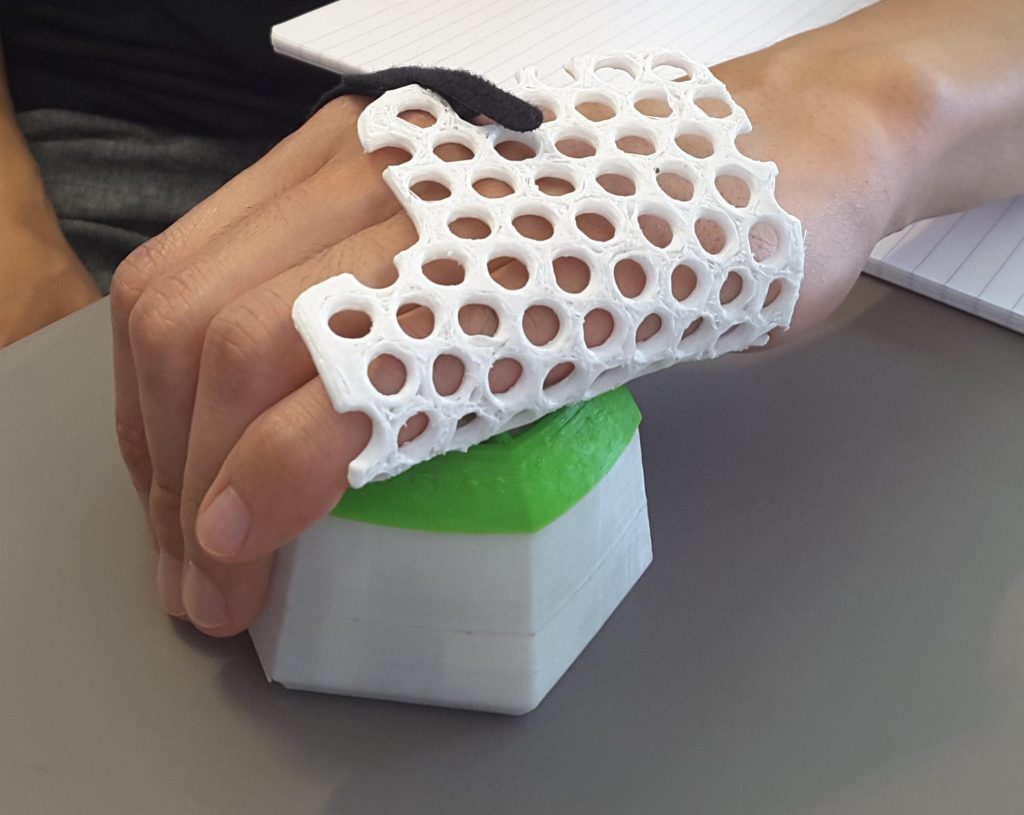
The Cellulo for rehabilitation project aims to provide practical, easy to use and intuitive gamified rehabilitation by using these tangible robots as game agents and objects. Our first game, Pacman for upper arm exercises, is designed iteratively with participation of stroke, brachial plexus and cerebral palsy patients (18 in total) and seven therapists in four different therapy centers.
A number of game elements are designed for tuning speed, accuracy, range of motion and challenge level; these are:
- Different maps with various mazes or sizes,
- One or two ghost(s) robot(s) chasing the Pacman
- Speed of the chasing robot(s)
- Optional rules:
- Turn rule where the user can only collect the fruits by rotating the robot on top of them,
- Cross border penalty rule where the user loses the last eaten fruit when he/she crashes into a wall,
- Haptic feedback rule to provide haptic informative assistance when the user crashes into a wall.







Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.