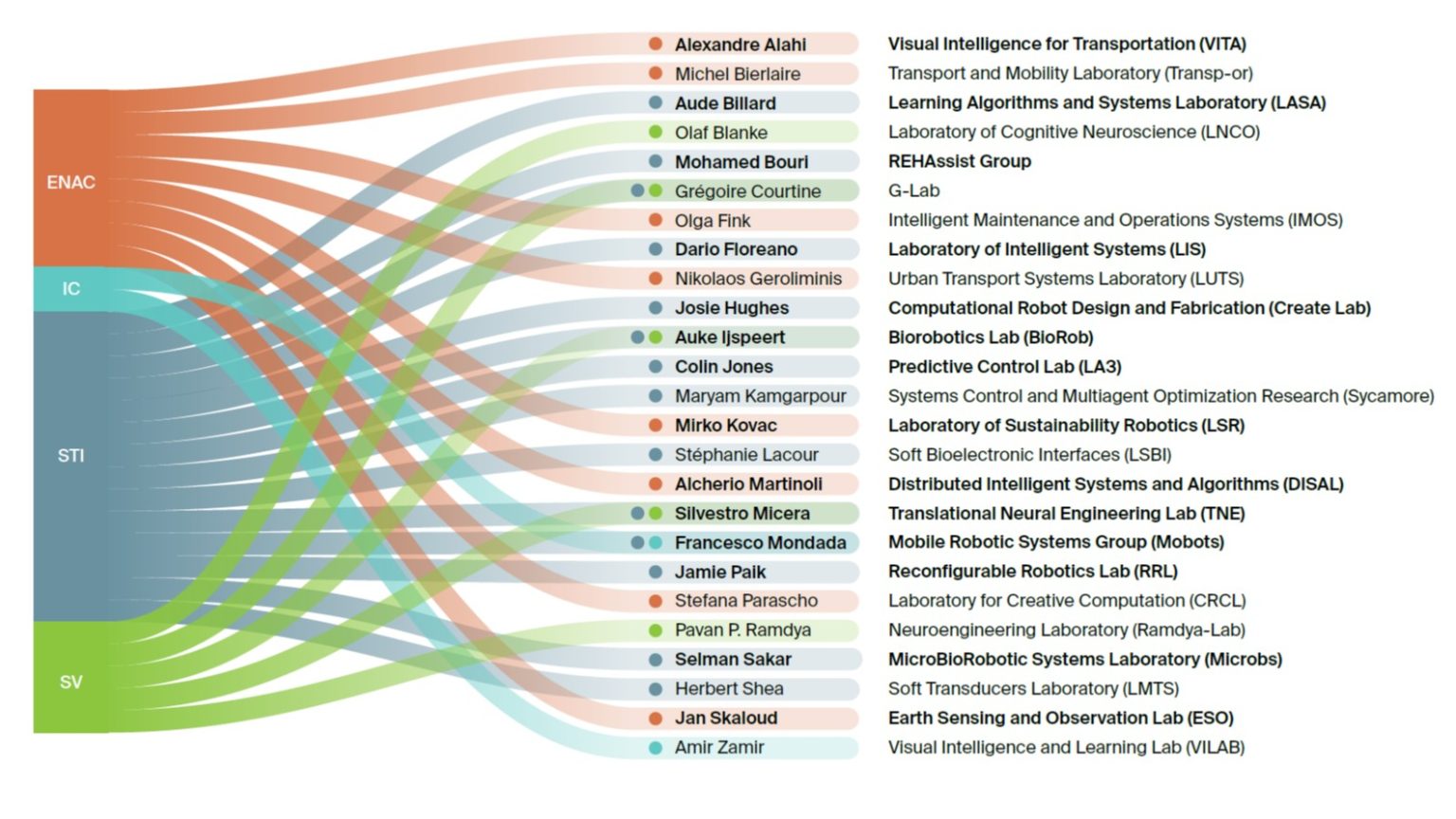
Our Labs
A showcase of cutting-edge research and development where EPFL’s robotics labs drive the future of technology through groundbreaking projects.
- Advanced lab search
- Below is an interactive list of all core robotics labs and affiliated labs with robotics expertise at EPFL. For specific expertise or research topics in robotics, please visit the “Our Experts” page.
- Virtual lab tour
- For a brief overview of each lab, visit our “Virtual Lab Tour” page, where you can find short videos showcasing the work of each respective lab.