
Vacuum-powered robotic systems empower diverse capabilities
We have developed a Vacuum-powered Soft Pneumatic Actuator (V-SPA) which leverages a single, shared vacuum power supply and enables complex soft robotic systems with multiple-DoF and diverse functions. In addition to actuation, other utilities enabled by vacuum pressure include gripping and stiffening through granular media jamming, as well as direct suction adhesion to smooth surfaces, for manipulation or vertical fixation. We investigated the performance of the new actuator through direct characterization of a 3-DoF, plug-and-play V-SPA Module built from multiple V-SPAs, and demonstrate the integration of different vacuum-enabled capabilities with a continuum-style robot platform outfitted with modular peripheral mechanisms. We show these different vacuum-powered modules can be combined to achieve a variety of tasks, including multi-modal locomotion, object manipulation, and stiffness tuning to illustrate the utility and viability of vacuum as a singular alternative power source for soft pneumatic robots, and not just a peripheral feature in itself. Our results highlight the effectiveness of V-SPAs in providing core soft robot capabilities and facilitating the consolidation of previously disparate subsystems for actuation and various specialized tasks, conducive to improving the compact design efficiency of larger, more complex multi-functional soft robotic systems.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Continuous workspace joystick control of single V-SPA module
Continuous angle control of a single V-SPA module was achieved using pulse width modulation (PWM) of the onboard solenoid valve. Empirical testing was performed to obtain the relationship between the duty cycle and corresponding angular position for a single actuator direction in the module. A heuristic mapping strategy was then employed to estimate the duty cycle commands for driving multiple adjacent actuators in the module to achieve continuous spherical control. A joystick was used to provide angular and directional command inputs to a single module. This example demonstrates a useful method for controlling soft robotic actuator modules based on estimated control distribution between multiple actuators, providing a simplified control strategy for complex, multi-DoF soft robotic systems.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Low inertia Coil V-SPAs
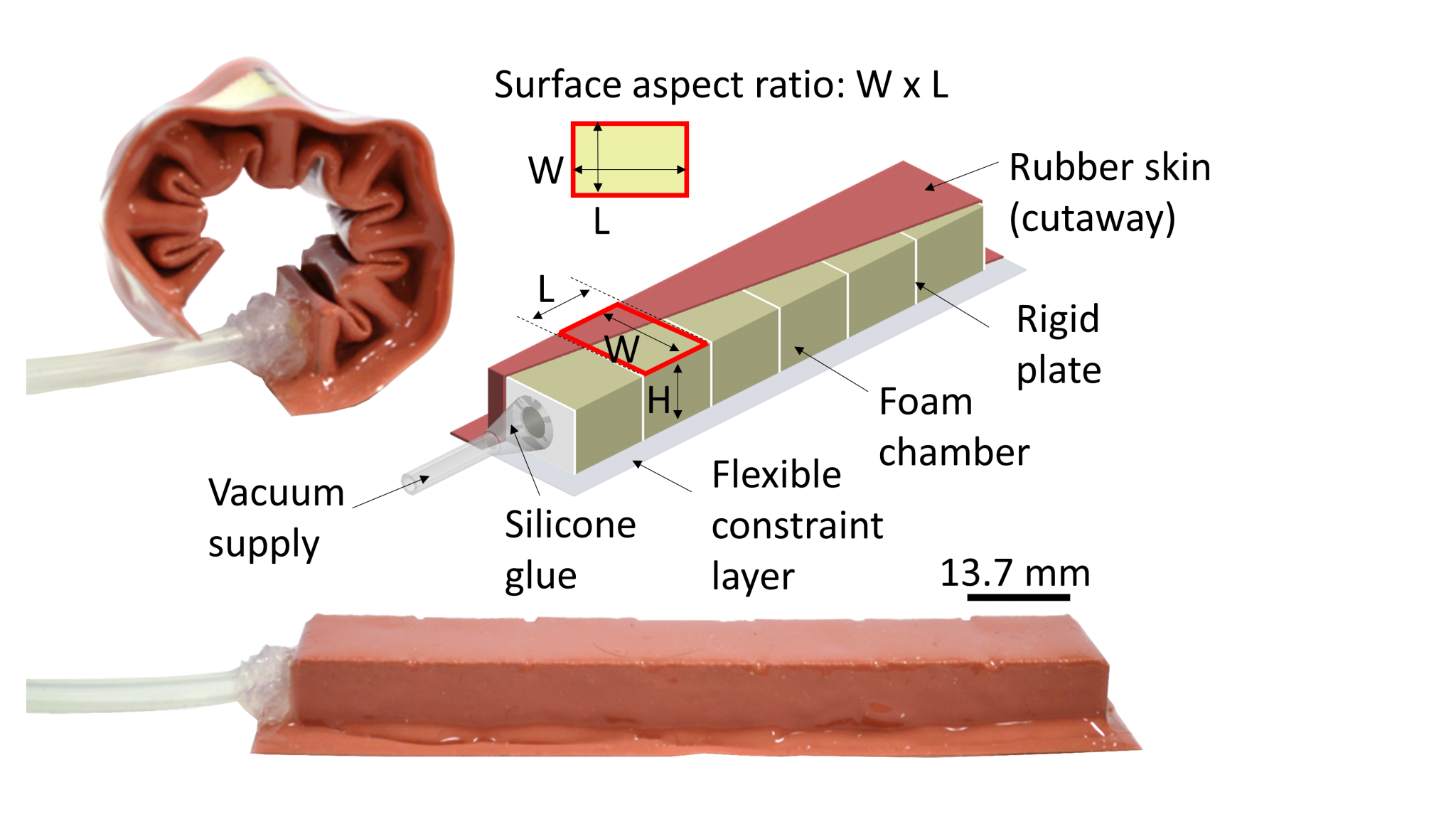
We produced a new type of vacuum-powered SPA known as the Coil V-SPA with extreme bending range of motion, and high speed actuation. This type of actuator is fabricated from the same materials used in 3-DoF V-SPA modules, including a soft foam core and silicone rubber skin, with the addition of a flexible constraint layer resistant to buckling or stretching. The actuators have been used to characterize the relative relationship of simple chamber geometries to actuator performance, toward optimizing V-SPA designs at different customized scales. Coil V-SPAs are envisioned to have great utility in applications which benefit from their light weight, and rapid motion capabilities, or extreme range-of-motion coiling behavior which might allow efficient underactuated grasping of slender objects.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
References
Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
New soft robots really suck: Vacuum-powered systems empower diverse capabilities
Science Robotics. 2017. Vol. 2, num. 9, p. eaan6357. DOI : 10.1126/scirobotics.aan6357.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.
Modular soft pneumatic actuator system design for compliance matching
Lausanne, EPFL, 2019.Practical control methods for vacuum driven soft actuator modules
2017. IEEE International Conference on Intelligent Robots and Systems (IROS), Vancouver, Canada, September 24-28. DOI : 10.1109/IROS.2017.8202296.Please note that the publication lists from Infoscience integrated into the EPFL website, lab or people pages are frozen following the launch of the new version of platform. The owners of these pages are invited to recreate their publication list from Infoscience. For any assistance, please consult the Infoscience help or contact support.