Grasp mode and compliance control in under-actuated grippers
Every robotic gripper requires an equilibrated solution towards the grasp adaptability, precision, and load bearing capacity. Utilizing the adjustable stiffness of the shape memory polymers, our goal is to introduce an under-actuated gripper that can adapt its mode of grasp and compliance depending on the task.
We use tendon-driven robotic origami, robogami, design framework for making the gripper. Thanks to the unique layer-by-layer manufacturing process of robogamis, the proposed design can easily be scaled for different applications. Also, the nominally 2D fabrication process allows embedding different functional layers with a high fidelity.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
For more information refer to the following publications:
1- A. Firouzeh and J. Paik, ” Grasp mode and compliance control of an under-actuated origami gripper using adjustable stiffness joints” IEEE/ASME Transactions on Mechatronics, 2017
http://ieeexplore.ieee.org/document/7994658/
2- A. Firouzeh, M. Salerno, and J. Paik, “Stiffness Control with Shape Memory Polymer in Underactuated Robotic Origamis” IEEE/ASME Transactions on Robotics, 2017
http://ieeexplore.ieee.org/document/7915733/
SPA with Embedded Variable Stiffness Layers
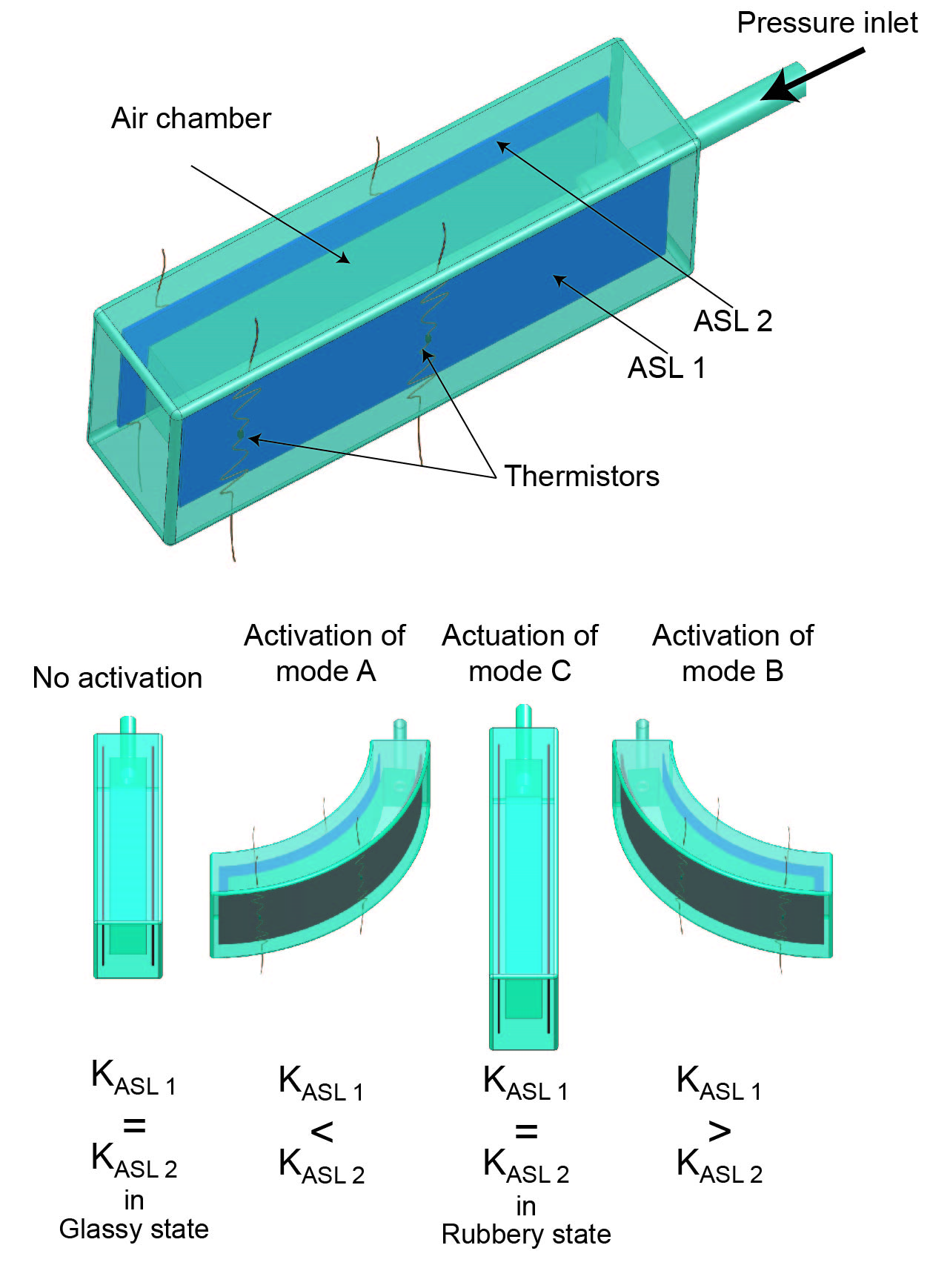
One of the main challenges in using SPA is difficulty of miniaturization of the systems with multiple degrees of freedom. By adding adjustable stiffness layers, we can have additional degrees of freedom with minimum added complexity to the hardware. The stiffness can be modulated by controlling the temperature of the ASLs.
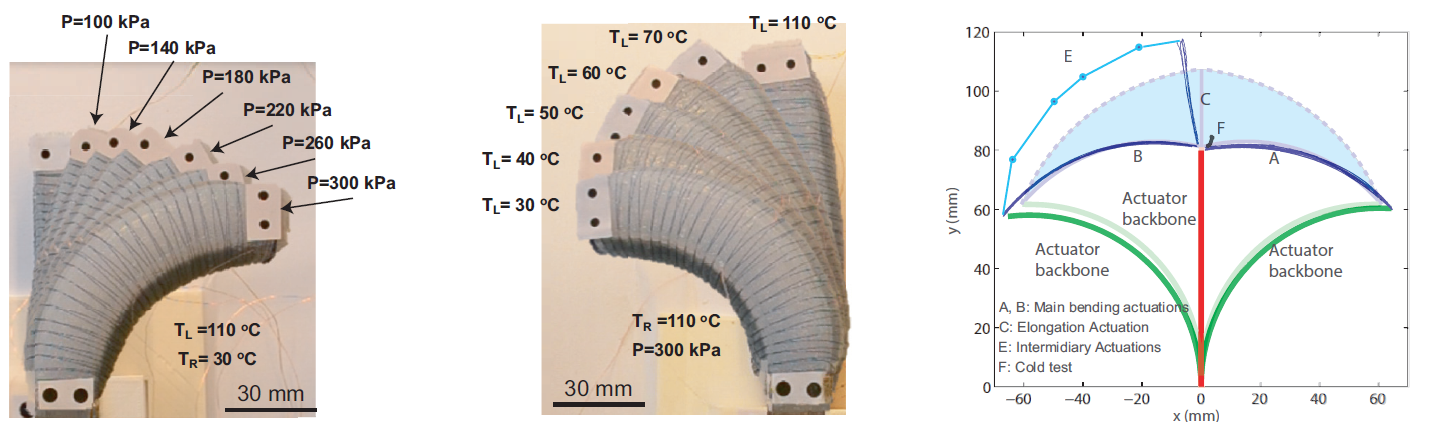
The work space of the actuator expands considerably by adding the additional degrees of freedom.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
The video presents 3 main modes of actuation of Soft Pneumatic Actuator (SPA) with embedded Adaptive Stiffness Layer (ASL).
Under-Actuated Robotic Arm with Variable Stiffness
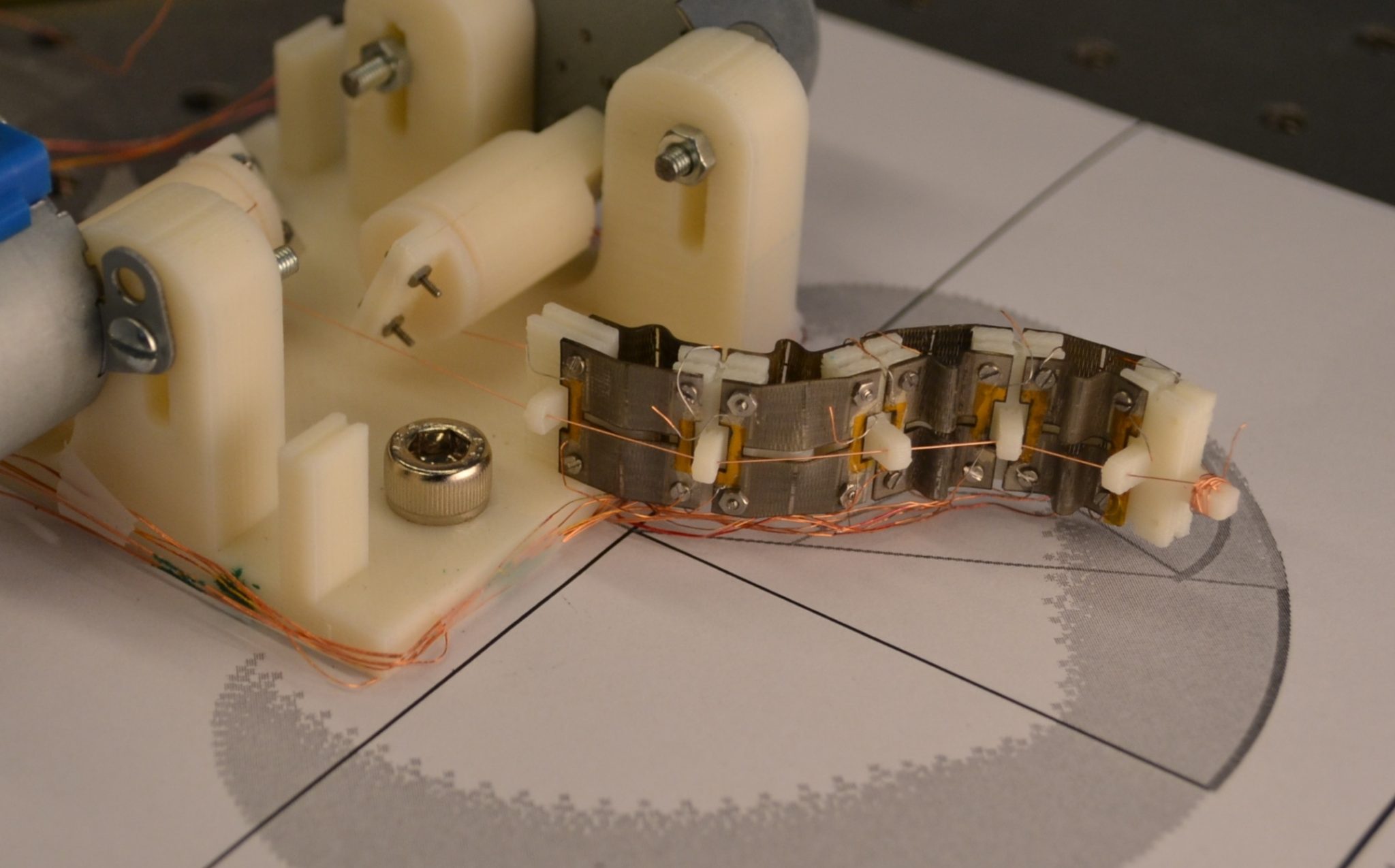
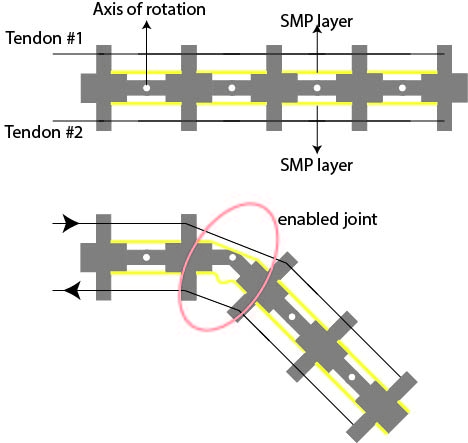
One method to expand the workspace of the robotic arms without adding motors is to embed locking mechanisms to direct the actuation to a desired joint (or series of joints). The presented design exploits modulus of elasticity change in SMP to adjust the stiffness of the joints in the robotic arm.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
Under actuated robotic arm with one independent source of actuation and 4 joints. Accurate control of the joint angles is possible thorough directing the actuation to a desired joint.