Interactive SPA skin
The latest wearable technologies demand more intuitive and sophisticated interfaces for communication, sensing, and feedback closer to the body. We have developed a novel soft pneumatic actuator (SPA) based sensor integrated interface, SPA-skin, that allows bidirectional tactile information transfer to facilitate simpler and responsive wearable interface.
The SPA-skin technology is ideal for the wearable devices which require variable frequency vibration and distribution of vibration locations over human body. This multi-layered compliant SPA-skin is capable of producing high frequency (0–100Hz) vibrations with modulable amplitude force (up to 1N). Along with the embedded piezo-ceramic sensors, the quasi-2D form and low-profile, the soft SPA-skin provides an ideal “hardware” interface for high fidelity haptic feedback backed with sensing and actuator closed-loop control.
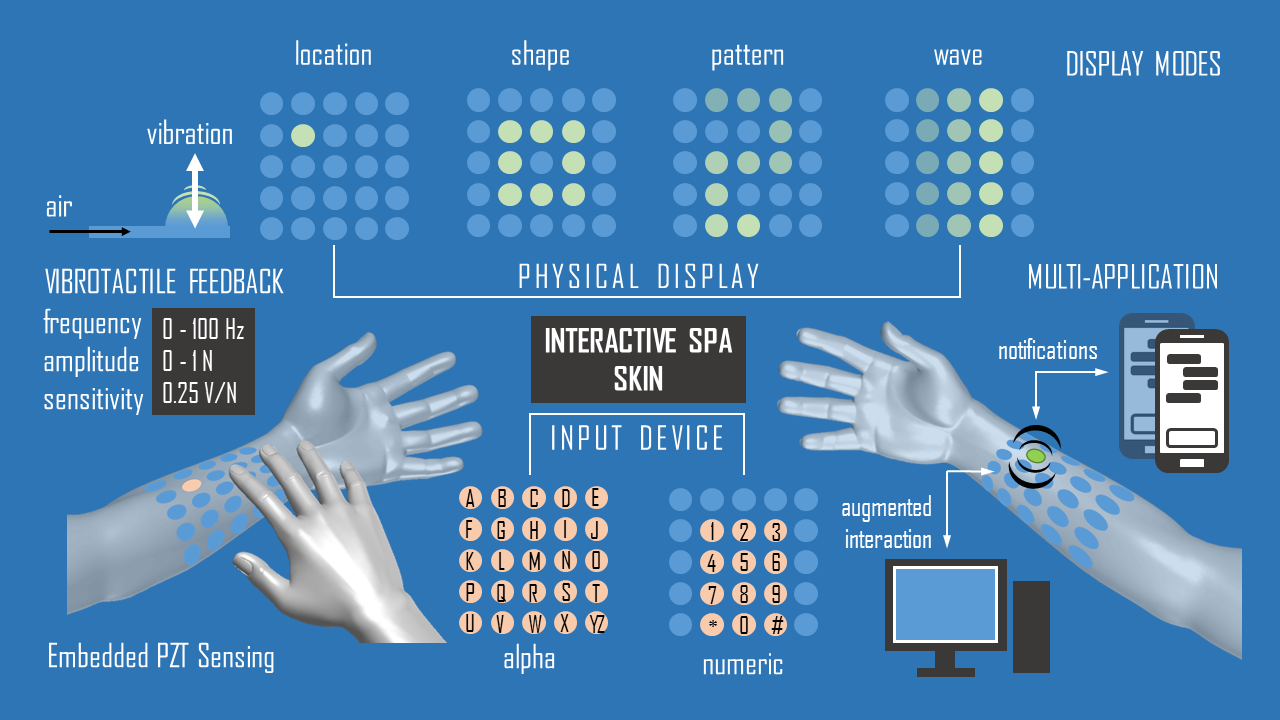
Figure1: Interactive SPA-skin concept. Vibrotactile feedback and integrated sensing enables multimodal bidirectional information transfer between wearer and computer.
The interactive SPA-skin platform is fabricated using multilayer quasi 2D manufacturing technique to achieve a low profile monolithic design with multi-functional layers. The actuation layer is made of two silicone sheets with a mask between them to prevent the layers sticking. Where as the sensing layer is fabricated using piezoelectric ceramic elements embedded into silicone sheets which convert mechanical stress (the pressure exerted by touching something) into an electrical charge.
Embed of video is only possible from Mediaspace, Vimeo or Youtube
The technology provides a highly customizable and a wearable physical interface with facility of the closed-loop control for multiple vibrotactile signals. As described above, it can be used as a plug and play component for a feedback mechanism in rehabilitation devices for training patients with loss of movement e.g. after stroke, or for providing a sense of touch in virtual reality games.
References
Hand and face somatotopy shown using MRI-safe vibrotactile stimulation with a novel soft pneumatic actuator (SPA)-skin interface
Neuroimage. 2023-02-11. Vol. 269, p. 119932. DOI : 10.1016/j.neuroimage.2023.119932.Soft Touch using Soft Pneumatic Actuator-Skin as a Wearable Haptic Feedback Device
Advanced Intelligent Systems. 2021-03-01. Vol. 3, num. 3, p. 2000168. DOI : 10.1002/aisy.202000168.Comprehensive Interactive Soft Interfaces for Wearable Tactile Feedback
Lausanne, EPFL, 2021.Closed-Loop Haptic Feedback Control Using a Self-Sensing Soft Pneumatic Actuator Skin
Soft Robotics. 2020. Vol. 7, num. 1, p. 22-29. DOI : 10.1089/soro.2019.0013.A soft portable wearable pneumatic interactive suit
US11458067; EP3631395; EP3631395; US2020093679; KR20200019636; WO2018220596; WO2018220596.
2018.