MIROS is our novel force-feedback surface that creates and modulates distinctive profile and stiffness to interact with the user in contact. This surface is made of a set of modules at various scales that can interact with different parts of the human body to create an interactive environment.

This first prototype is an array of 3×3 modules with a radius of 10cm of the top surface. Each module has three degrees of freedom (2 rotation + 1 vertical translation) to interact with human hands as a reconfigurable desktop.
Entertainment and medical rehabilitation are the two major streams of application envisioned. The disclosed devices allow the human to interact with a desktop surface to give inputs to a computer while standing on a floor surface that can be modulated with respect to the motions of the user.
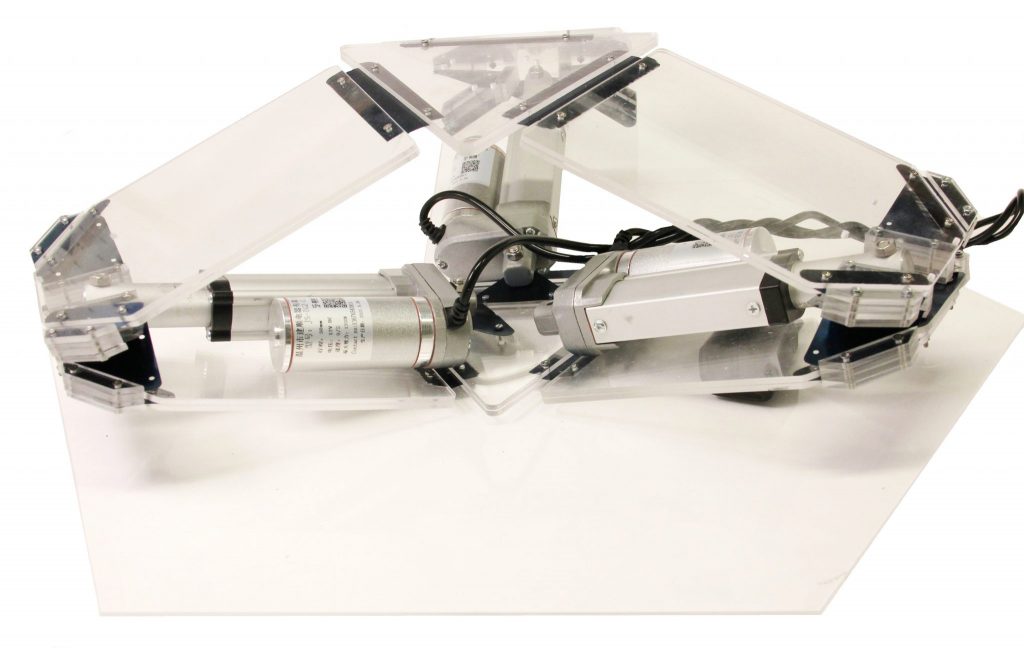
The second prototype is a single module with a radius of 60cm to act a a reconfigurable floor system for interactive human living environment. This prototype was a development tool to optimize the design of the current prototype of the system which is a 60cm wide platform that can withstand a human-body weight and interact with it through three degrees of freedom and a set of sensors throughout the origami structure.

Current technical capabilities of one module are defined as follows:
| # Degrees of Freedom | 3 (Vertical Z Translation & X+Y rotations) |
| Vertical Height | 5 (folded) – 40 (fully extended) [cm] |
| Angle Span | +/- 25° (maximal angle when fully extended) |
| Sensing | 3 vertical load cells (in progress) + gyroscopes |
| Control | 1 Raspberry pi with Motor control board |
| Actuators | 12V Linear DC Motors |
The following video show the current capabilities of our device. Current development aims at allowing a human-load to stand on a pair of platforms reliably and safely.
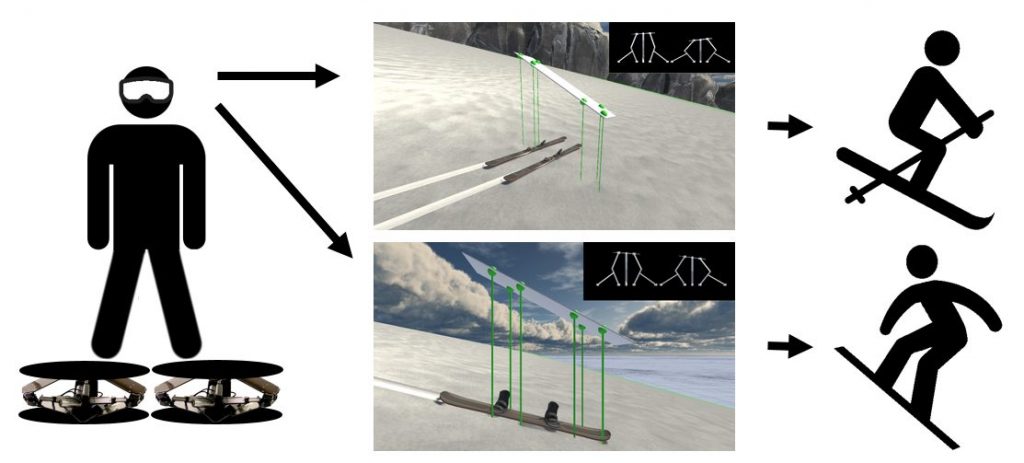
The future work will focus on controlling a set of modules in order to create Virtual Reality interactive surfaces that can be used as human-machine interactive devices. One of our goal is to use a pair of modules to make a Ski / Snowboard Simulator in order to control the motion in the virtual environment while having a force and position/orientation feedback directly on the legs.
Contact: Fabio Zuliani, Alihan Bakir
More: miros.technology