In this line of research, we study “generalizable” and “accurate” vehicle trajectory prediction solutions from different aspects:
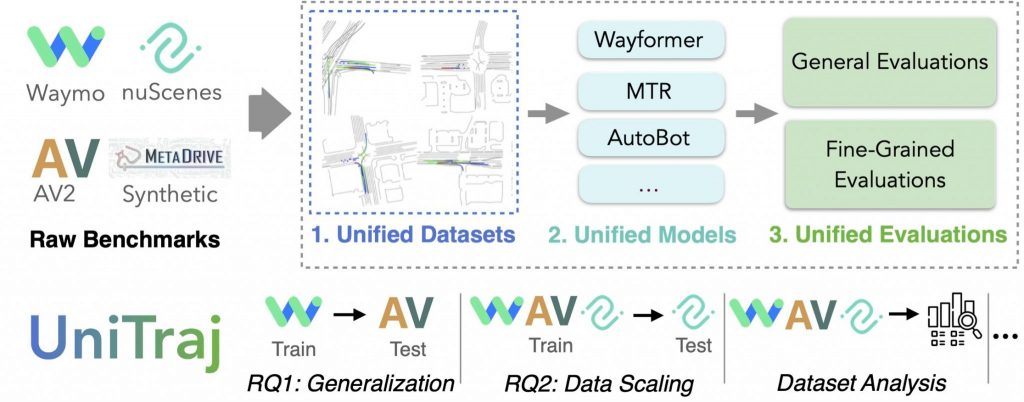
- UniTraj framework: We provide a framework including several unified datasets that allows multi-domain training and evaluation. It also includes multiple baselines and evaluations, opening up new opportunities in the field. Link to the project
- Adding knowledge to the models: Adding human knowledge to the data-driven models is an effective approach to improve models’ generalization. To this end, we propose “Realistic Residual Block” (RRB) to combine any off-the-shelf knowledge-driven predictor with data-driven predictors. Link to the project