
Recently, there has been an arms race of pose forecasting methods aimed at solving the spatio-temporal task of predicting a sequence of future 3D poses of a person given a sequence of past observed ones. However, the lack of unified benchmarks and limited uncertainty analysis have hindered progress in the field. To address this, we first develop an open-source library for human pose forecasting, including multiple models, supporting several datasets, and employing standardized evaluation metrics, with the aim of promoting research and moving toward a unified and consistent evaluation. Second, we devise two types of uncertainty in the problem to increase performance and convey better trust: 1) we propose a method for modeling aleatoric uncertainty by using uncertainty priors to inject knowledge about the pattern of uncertainty. This focuses the capacity of the model in the direction of more meaningful supervision while reducing the number of learned parameters and improving stability; 2) we introduce a novel approach for quantifying the epistemic uncertainty of any model through clustering and measuring the entropy of its assignments.
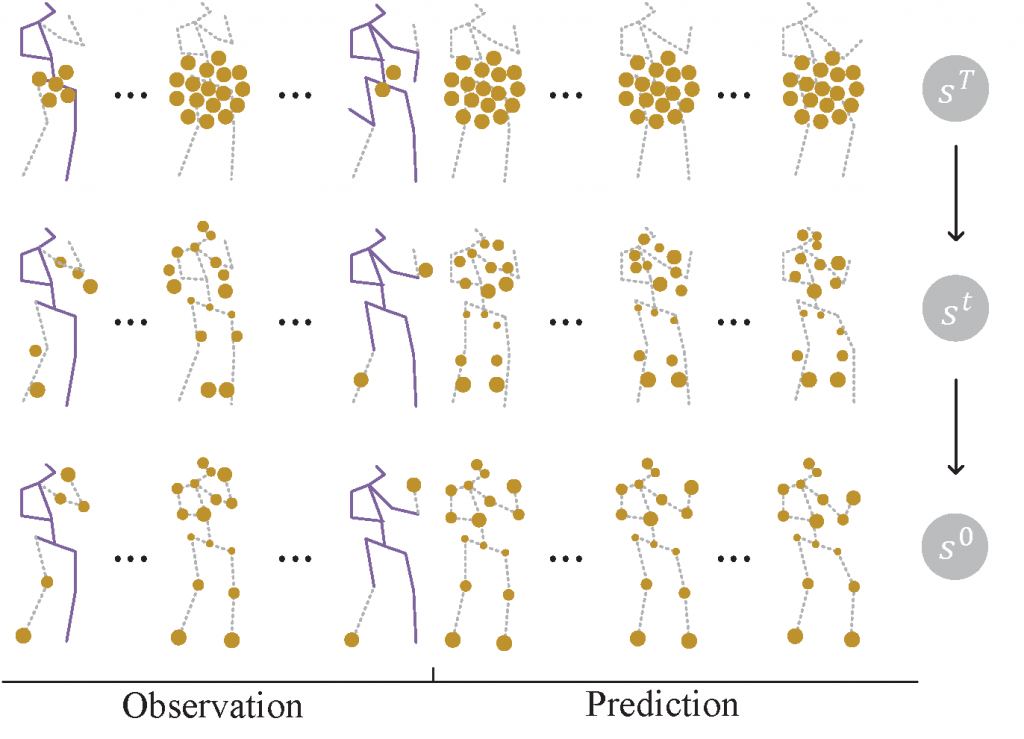 Moreover, this task is inevitably subject to noisy inputs arising from inaccurate 3D pose estimations and occlusions. To address these challenges, we propose a diffusion-based approach that can predict given noisy observations. We frame the prediction task as a denoising problem, where both observation and prediction are considered as a single sequence containing missing elements (whether in the observation or prediction horizon). All missing elements are treated as noise and denoised with our conditional diffusion model. To better handle long-term forecasting horizon, we present a temporal cascaded diffusion model. Our framework is generic enough to improve any 3D pose prediction model as a pre-processing step to repair their inputs and a post-processing step to refine their outputs.
Moreover, this task is inevitably subject to noisy inputs arising from inaccurate 3D pose estimations and occlusions. To address these challenges, we propose a diffusion-based approach that can predict given noisy observations. We frame the prediction task as a denoising problem, where both observation and prediction are considered as a single sequence containing missing elements (whether in the observation or prediction horizon). All missing elements are treated as noise and denoised with our conditional diffusion model. To better handle long-term forecasting horizon, we present a temporal cascaded diffusion model. Our framework is generic enough to improve any 3D pose prediction model as a pre-processing step to repair their inputs and a post-processing step to refine their outputs.